近期,太原科技大学与曼尼托巴大学团队共同提出一种力流导引的功能梯度点阵结构刚度设计方法,通过显式表达结构内部的载荷传递路径,并建立晶胞距传力路径的距离参数与晶胞孔隙率控制参数之间的映射关系,实现功能梯度点阵结构刚度的可控设计。该方法基于相对刚度力流理论实现结构主传力路径的可视化,建立了一种连续空间迭代细分搜索方法获取晶胞到主传力路径的最短距离并作为晶胞孔隙率控制参数,通过晶胞离散度分析确定了最优等值映射区间。以经典的悬臂梁和三点弯曲梁模型为研究对象,设计了一系列双向功能梯度点阵结构,仿真和实验结果表明,在相同体积分数下,该方法设计的双向梯度点阵结构与原结构相比具有更好的刚度性能。
该论文第一完成单位为太原科技大学,第一作者为2023级机械工程专业硕士研究生王栋,太原科技大学王朝华副教授、曼尼托巴大学Nan Wu教授为论文的共同通讯作者,研究工作得到了国家自然科学基金的资助。
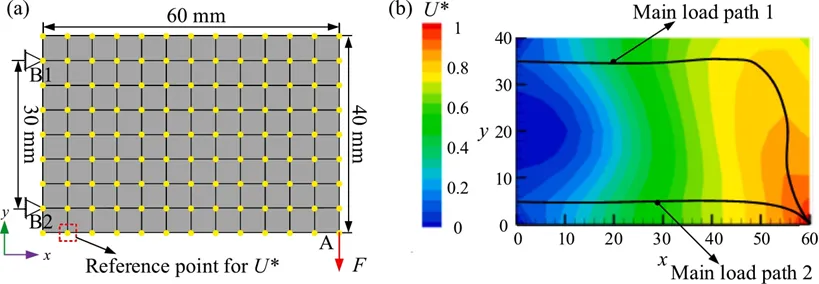
图1:悬臂梁传力路径可视化
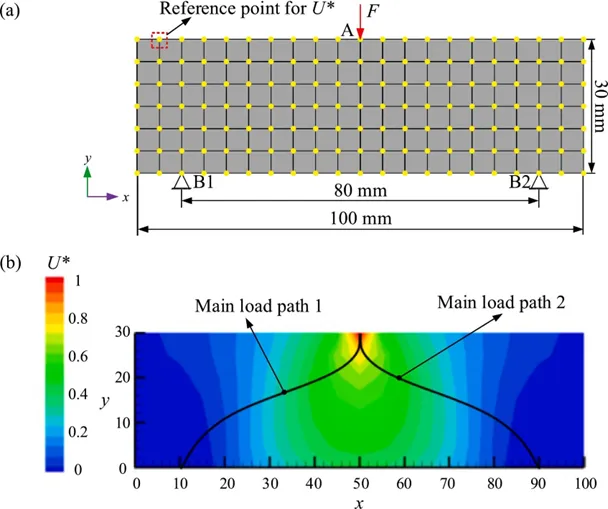
图2:三点弯曲梁传力路径可视化
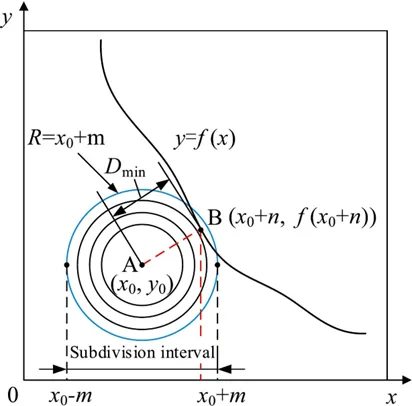
图3:连续空间迭代细分搜索法图示
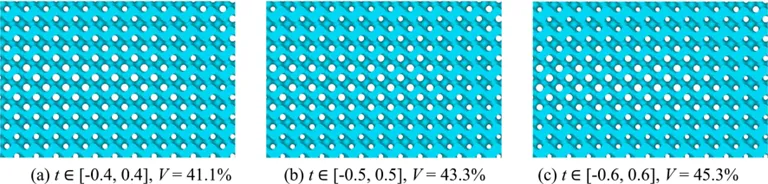
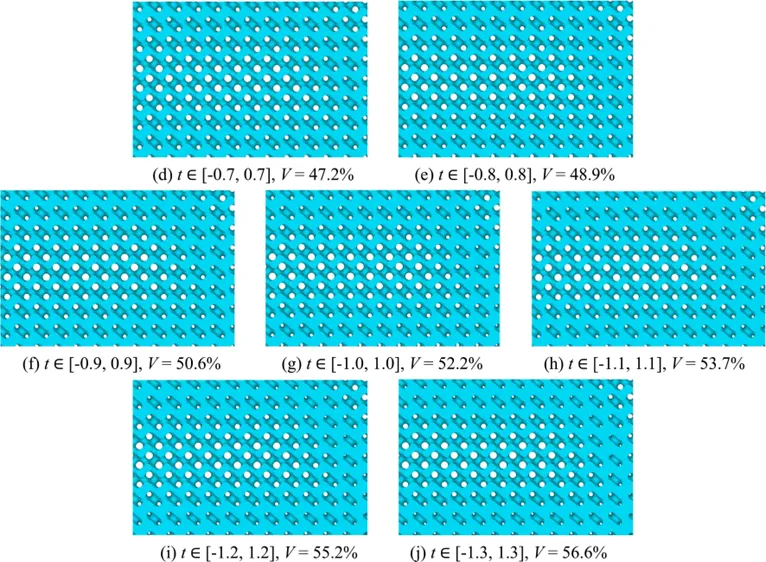
图4:不同映射区间下悬臂梁功能梯度点阵结构模型
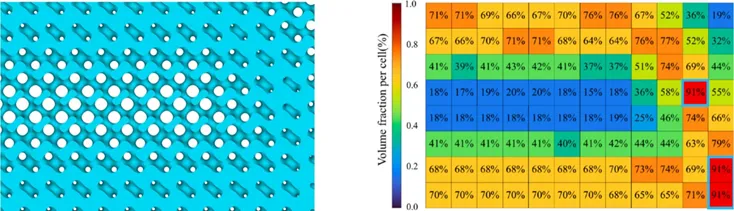
图5:悬臂梁双向梯度点阵结构模型与晶胞体积分数分布图
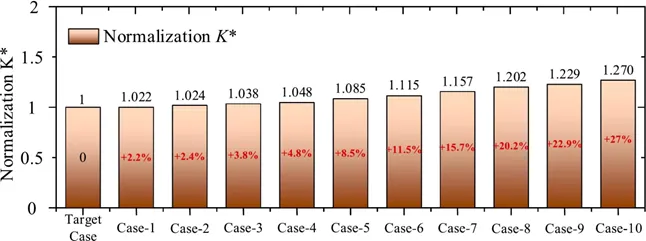
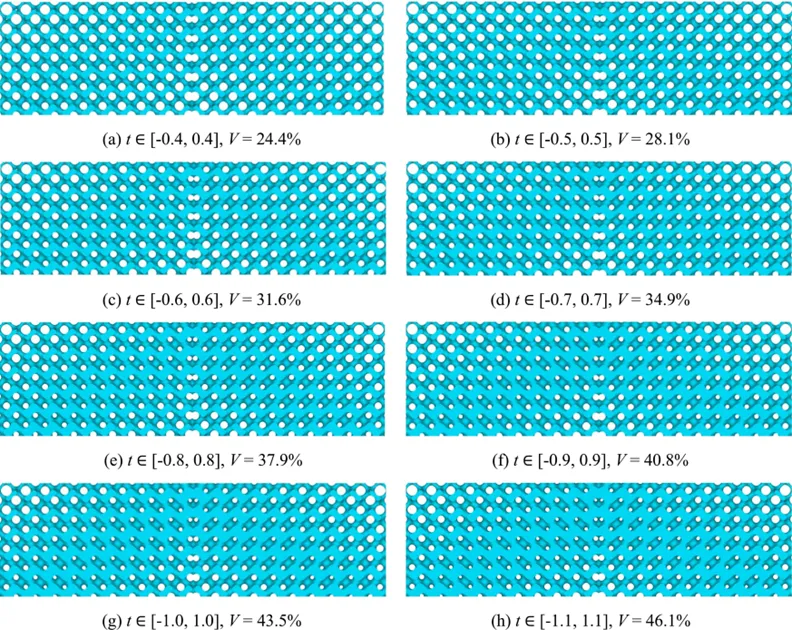

图7:不同映射区间下三点弯曲梁功能梯度点阵结构模型
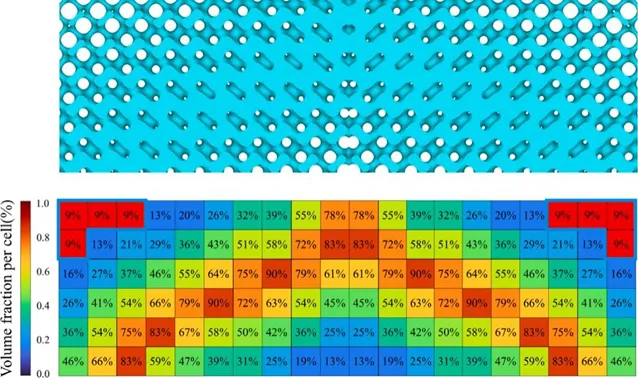
图8:三点弯曲梁双向梯度点阵结构模型与晶胞体积分数分布图
(1)结构内部力流的显式表达:建立了一种基于相对刚度的结构传力路径可视化方法,实现对结构内部载荷传递规律的显式表达,在点阵结构设计与优化过程中可以提供显式的力学指导。
(2)基于力流的晶胞密度控制参数:建立连续空间迭代细分搜索法计算晶胞中心点到主传力路径的最短距离,作为晶胞密度控制参数。
(3)晶胞离散度分析验证最优等值区间:通过对悬臂梁和三点弯曲梁进行晶胞离散度分析,确定最优的等值参数映射区间。
(4)晶胞孔隙率的精准设计:构建距离参数与Gyroid晶胞等值参数区间的映射关系,精准指导点阵结构不同位置上晶胞的孔隙率大小。
(5)双向梯度设计更高效:在晶胞离散度分析的基础上,建立双向梯度点阵结构晶胞孔隙率控制算法,进一步实现点阵结构的高效设计。
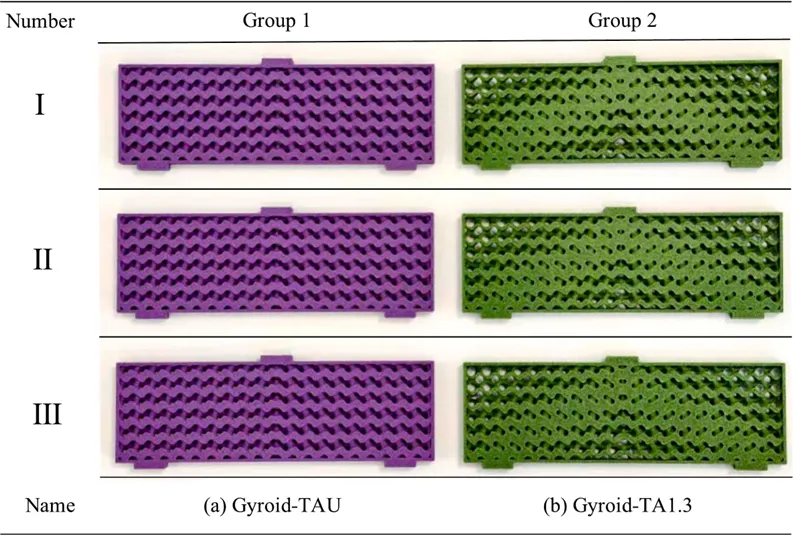
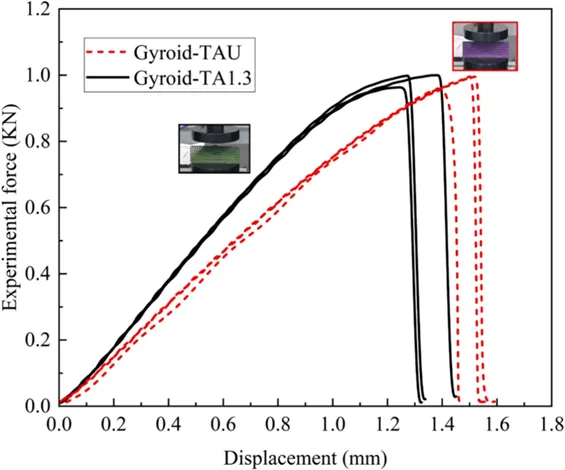
(6)多方位验证方法合理性:通过仿真+实验+传力路径有效性多方位分析,验证了力流指导功能梯度点阵结构刚度设计的有效性,表明设计方法可大幅提升点阵结构设计过程中材料分布的合理性。
(7)方法通用性广泛:方法适用于多种结构的传力路径可视化表达,且适用于任意晶胞点阵结构的刚度设计,例如桁架类晶胞(BCC、FCC)和其他TPMS晶胞(primitive、diamond、IWP)等。
引用格式:
Wang D, Wang Z, Zhao S, et al. Stiffness design method of Gyroid-based functionally graded lattice structures with variable porosity controlled by load path[J]. Composite Structures, 2026, 377: 119794.
原文链接:
https://doi.org/10.1016/j.compstruct.2025.119794
【免责声明】本文中的部分图片和文字信息来自该文献,版权归原作者所有。本文内容旨在传播学术研究信息,仅供参考与学习交流之用。本文中所有插图、图表及封面图片均来源于上述提及的原始研究论文。我们对文章内容的准确性、完整性或时效性不作任何明示或默示的保证,任何与原文内容存在的差异,均应以原始论文为准。邮箱jisuanlixueqianyan@yeah.net
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
