Nano Res.[能源]│太原理工大学桑胜波/马佳楠:基于微脊结构的可编程多响应MXene执行器
- 2026-05-09 03:32:04
背景介绍
近年来,柔性执行器因其能够通过响应外部刺激(包括光、湿度、热、pH值、溶剂、磁场和电场)将环境能量转化为机械能量而受到了显著关注。这些执行器能够实现类似于生物肌肉的连续变形和复杂运动,在微电子机械系统(MEMS)、生物医学设备和智能机器人的应用中展现了巨大的潜力。MXene (Ti3C2Tx) 以其卓越的亲水性、卓越的导电/导热性和卓越的机械强度而闻名,已成为开发刺激响应执行器的理想候选材料。然而,当前基于 MXene 的执行器无法同时实现多重刺激响应和可编程变形,这限制了它们在现实场景中的实际应用。
成果简介
本研究开发了一种具有可编程变形能力的多重响应 MXene 执行器,其由具有微脊结构的 MXene 薄膜与石蜡(PW)/Fe3O4 复合薄膜组成。基于 MXene 与 PW&Fe3O4 薄膜不同的亲水性,该双层执行器在湿度与光照作用下呈现出独特的膨胀/收缩行为。这种双层界面应变不匹配效应驱动了 MXene/PW&Fe3O4 执行器的形变。Fe3O4 纳米粒子的引入更赋予其磁致动能力。值得注意的是,通过调控微脊结构取向可编程执行器变形形态(如手性结构与螺旋结构)。此外,这些基础执行器可采用热焊接技术实现拼接,从而构建各类复杂三维结构。凭借其多重响应能力和可编程变形特性,该 MXene/PW&Fe3O4 执行器可应用于仿生柔性机器人领域,例如仿生茉莉花、智能螺旋抓手及迷宫机器人。这项工作为 MXene 执行器的开发开辟了新途径。
图文导读
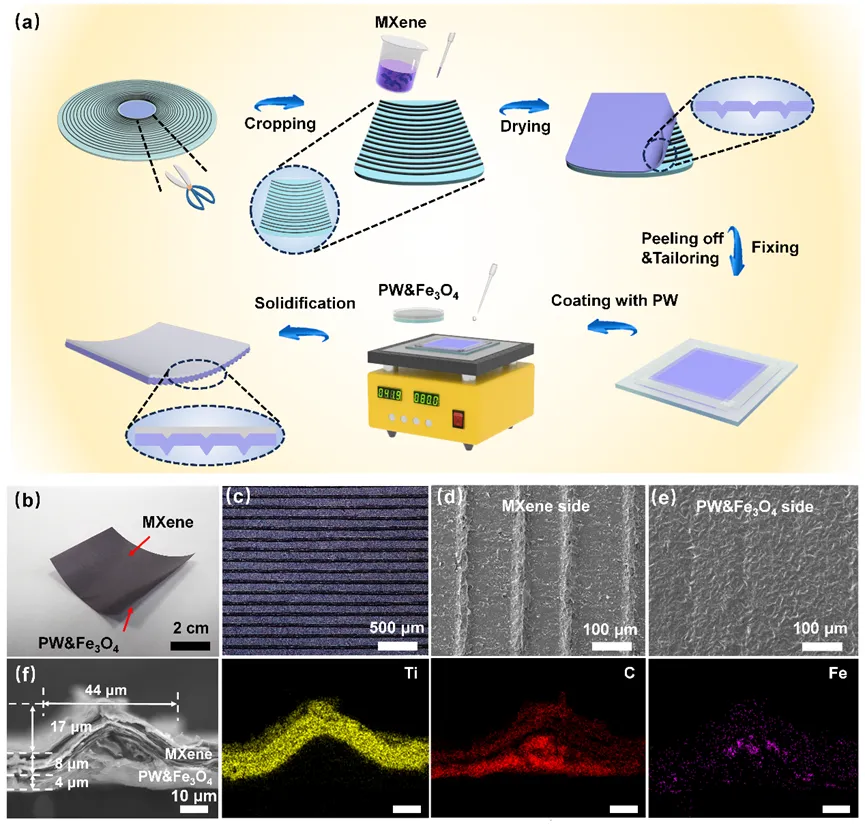
图1 多响应 MXene/PW&Fe3O4 双层薄膜的制备和表征。(a) MXene/PW&Fe3O4 双层薄膜的制造过程示意图。(b) MXene/PW&Fe3O4 执行器的光学照片。(c) 双层膜 MXene 侧的高分辨率显微镜图像。(d–e) 双层膜的 MXene 侧和 PW&Fe3O4 侧的表面 SEM 图。(f) MXene/PW&Fe3O4 双层膜的横截面 SEM 图像以及相应的 Ti、C 和 Fe 元素映射图像。
图1(a) 展示了利用唱片模板制备具有微脊结构的 MXene/PW&Fe3O4 双层薄膜的过程,以及薄膜的光学图像(图1(b))。此制备过程简单且无需额外有害化学品。显微图像(图1(c))和 SEM 表面形貌(图1(d, e))显示 MXene 侧具有周期约 100 μm 的微脊结构,而 PW 侧相对平整。截面 SEM(图1(f))表明 PW&Fe3O4 层厚约 4 μm,MXene 层厚约 8 μm,且两者界面接触良好,MXene 层呈现约 44 μm 宽、17 μm 高的微脊结构。元素面分布分析进一步证实碳分布均匀,Ti 和 Fe 元素分别仅存在于 MXene 侧和 PW&Fe3O4 侧,验证了双层结构的成功制备。
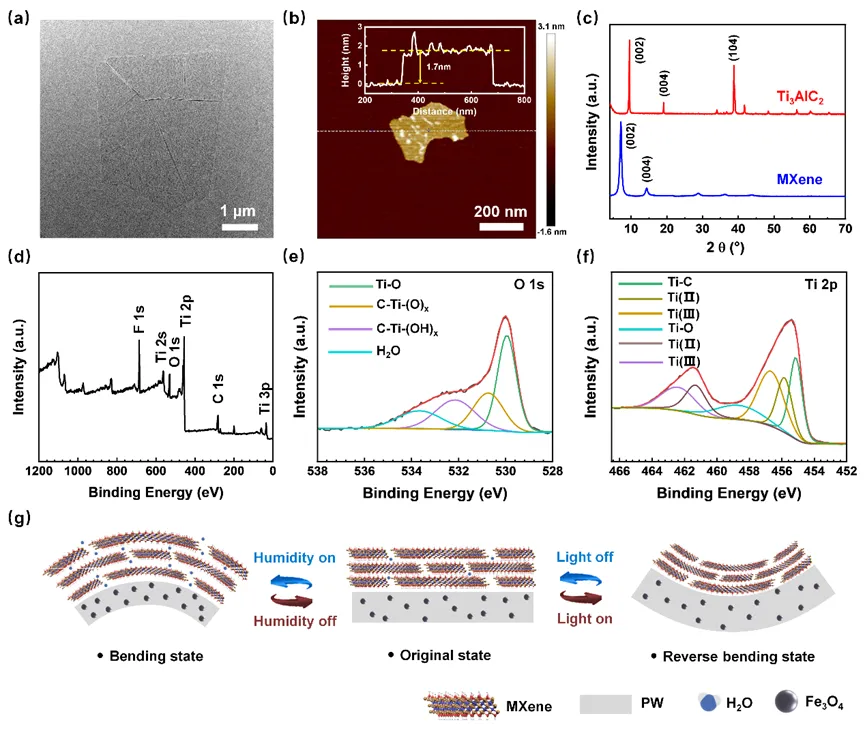
图2 MXene/PW&Fe3O4 薄膜的多响应机理。(a) MXene 纳米片的 TEM 图像。(b) MXene 纳米片的 AFM 图像。(c) Ti3AlC2 和 MXene 薄膜的 XRD 图案。(d) 测量 MXene 的 XPS 谱。(e) MXene 的 O 1s 光谱。(f) MXene 的 Ti 2p 光谱。(g) MXene/PW&Fe3O4 双层薄膜的多响应驱动机制示意图。
通过 TEM(图(a))、AFM(图(b))、XRD(图(c))、XPS(图(d–f))等一系列表征确认 MXene 的成功合成及其表面羟基赋予的亲水性,从而阐明了 MXene/PW&Fe3O4 双层执行器的多响应机制(图(g)):亲水 MXene 层作为主动层,在湿度升高时吸水膨胀,与疏水被动的 PW&Fe3O4 层产生不对称应变,驱动薄膜向 PW 侧弯曲;在光照下,MXene 的光热效应及两层材料的热膨胀系数差异导致 MXene 脱水收缩而 PW 层膨胀,使薄膜向 MXene 侧弯曲;此外,PW 基质中的 Fe3O4 纳米颗粒使执行器具备磁响应能力。
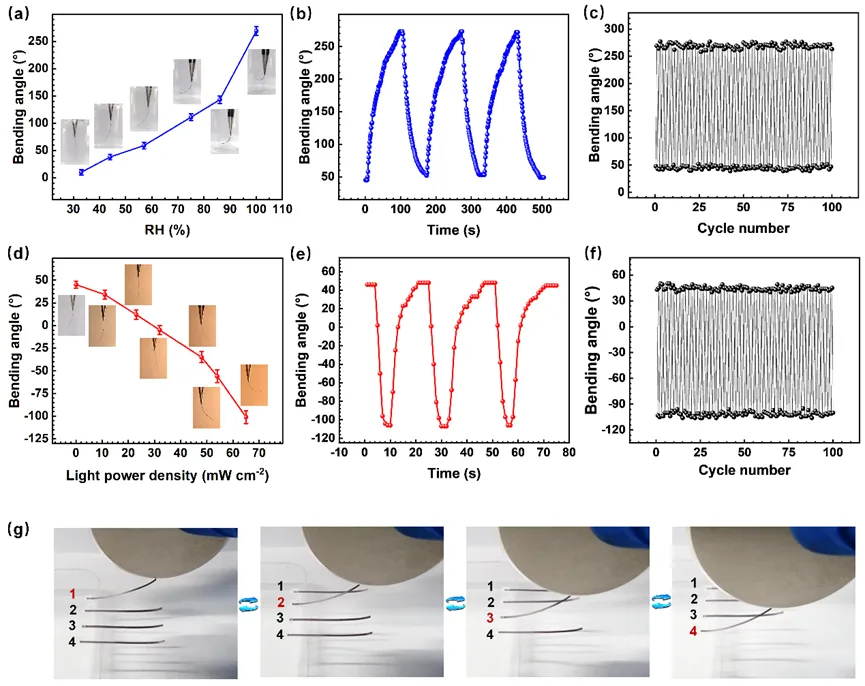
图3 MXene/PW&Fe3O4 双层薄膜的多响应驱动性能。(a) 湿度刺激下双层膜的弯曲角度与相对湿度的相关性。(b) 双层膜在 RH=44% 和 RH=100% 之间的响应和恢复曲线。(c) 双层膜 100 个变形循环的耐久性测试,湿度在 RH=44% 和 RH=100% 之间切换。(d) 双层膜的弯曲角度与光功率密度之间的相关性。(e) 双层膜在 0 至 65 mW·cm−2 之间的响应和恢复曲线。(f) 双层膜 100 个变形循环的耐久性测试,光功率密度在 0 和 65 mW·cm−2 之间切换。(g) 磁场下双层膜的光学图像。
测试表明,MXene/PW&Fe3O4 执行器在湿度、光照和磁场下均表现出优异驱动性能:湿度响应中(图(a–c)),相对湿度从 33% 增至 100% 时弯曲角从 10° 增大至 269°,响应/恢复时间约 97 s/48 s,循环 100 次性能稳定;光响应下(图(d–f)),光功率密度从 0 升至 65 mW·cm−2 时弯曲角从 45° 变为 −101°,响应更快(约 6 s/15 s),且历经 100 次循环和 30 天放置后性能保持稳定;因 Fe3O4 的引入,执行器还能对磁场做出快速、精确的响应(图(g))。多刺激驱动 100 次循环后层间仍结合牢固,无分层。
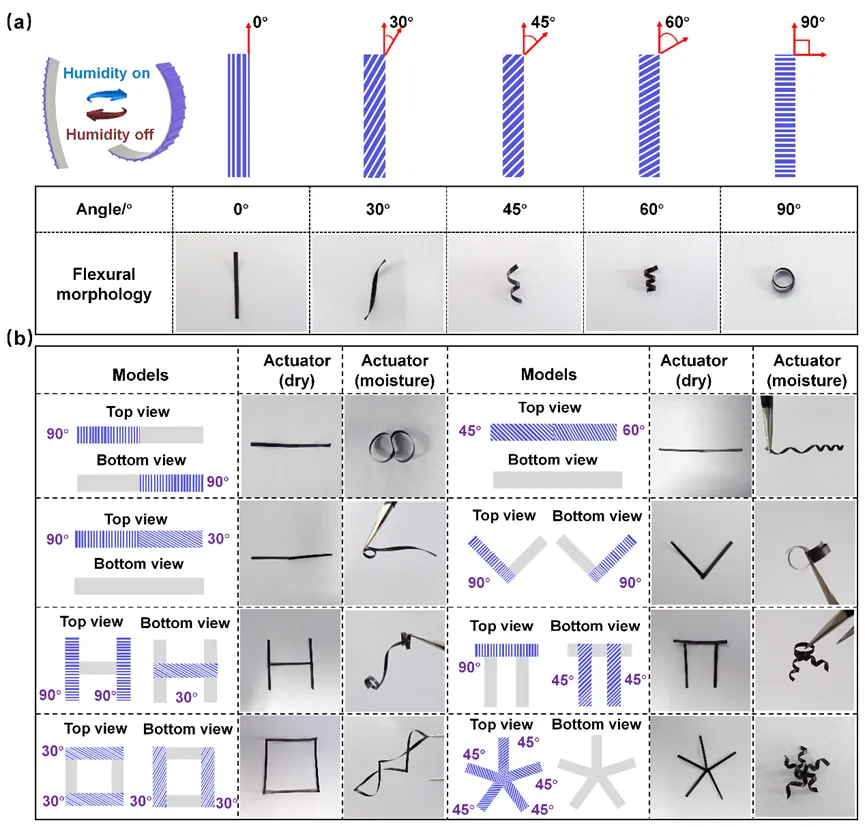
图4 MXene/PW&Fe3O4 执行器的可编程复杂变形行为。(a) 具有不同微脊结构取向的矩形 MXene/PW&Fe3O4 执行器在湿度驱动下的变形。(b) 由不同的 MXene/PW&Fe3O4 条带通过热焊接方法组装而成的一系列复杂的三维结构;从左到右是干燥条件下真实执行器及其在潮湿驱动下变形的模型、照片。每个 MXene/PW&Fe3O4 条的尺寸为 20 mm × 1.5 mm(长×宽),相对湿度为 100%。
图4(a) 展示了受植物细胞壁纤维素微纤维取向启发,通过调控 MXene/PW&Fe3O4 薄膜微脊结构取向(0°–90°),可实现湿度驱动下螺旋圈数递增、长度递减的可编程螺旋变形;进一步图(b) 展示了利用 PW 热相变特性,通过热焊接将不同取向条带组装成复杂结构,可在湿度刺激下实现从二维平面到预设三维构型的可控转换,湿度移除后恢复原状,展现出超越常规软执行器的多响应性与形状可编程性。
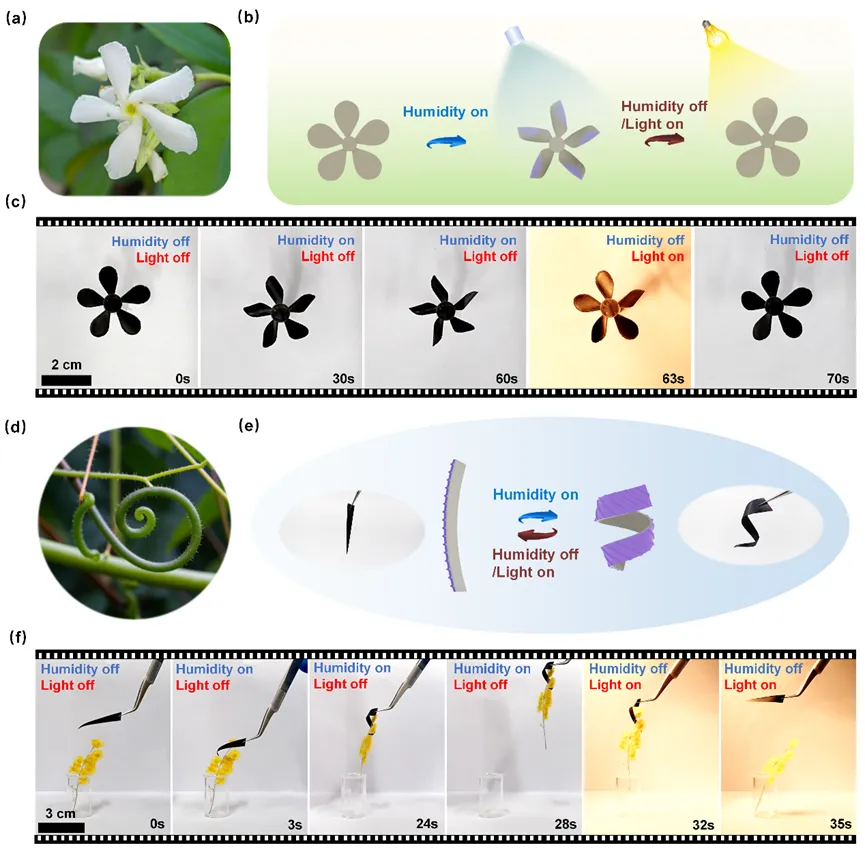
图5 (a) 万字茉莉的实物图片。(b) 仿生万字茉莉开花示意图。(c) 仿生万字茉莉开花过程的序列快照,其中相对湿度和光功率密度值分别为 100% 和 65 mW·cm−2。(d) 丝瓜络卷须的实物图片。(e) 智能螺旋夹具的示意图。(f) 使用湿度和光操纵智能螺旋夹具,其中相对湿度和光功率密度的值分别为 100% 和 65 mW·cm−2。
利用 MXene/PW&Fe3O4 执行器的多响应特性,我们受万字茉莉启发,通过热焊接将五片微脊取向为 30° 的泪滴状花瓣与圆形花蕊组装成仿生花朵(图5(a–c))。该花朵可在湿度刺激下吸水并向 PW&Fe3O4 侧螺旋弯曲,实现开花;在撤除湿度并施加光照时迅速恢复平整,从而实现了湿度诱导开花、光驱动闭合的可逆仿生运动。受丝瓜卷须攀爬机制启发,我们以 45° 微脊取向的细长三角形双层薄膜制成智能螺旋夹持器(图5(d–f))。该夹持器在湿度刺激下可螺旋弯曲并抓取物体(如重达其自重 12 倍的黄花),在光刺激下则恢复平直并释放物体,展现出结构简单、负载能力强的高性能抓取能力。
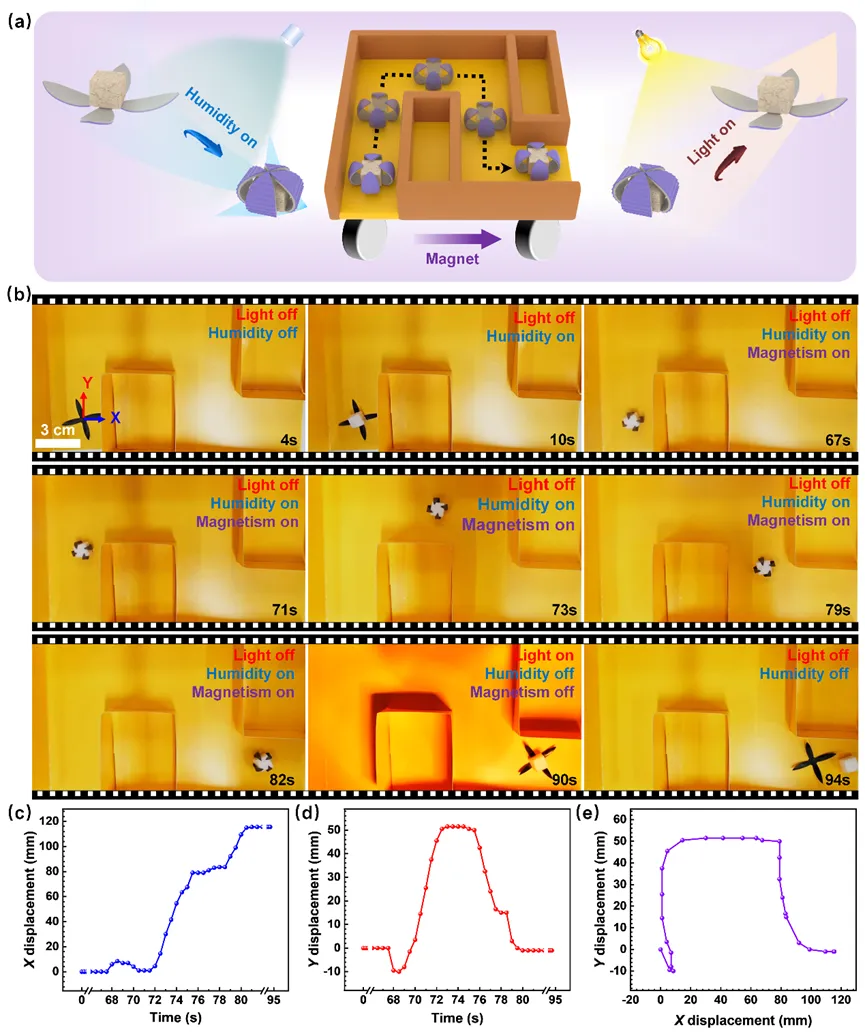
图6 迷宫机器人的多场耦合操纵。(a) 由湿度/光/磁操纵的迷宫机器人的示意图。(b) 迷宫机器人运行时的连续快照,其中相对湿度和光功率密度的值分别为 100% 和 65 mW·cm−2。(c, d) 分别是迷宫机器人 X 和 Y 位移的时间演化。(e) 迷宫机器人的坐标位移轨迹图。
利用 MXene/PW&Fe3O4 薄膜的多响应特性,我们进一步设计了由四个微脊取向为 90° 的花瓣构成的迷宫机器人(图6(a–e))。该机器人可通过湿度–光–磁多场耦合协同调控,依次实现抓取(湿度驱动)、沿预设迷宫路径运输(湿度与磁场协同)及释放(光场驱动)泡沫块的全流程操作,其连贯的运动轨迹验证了基于多物理场的灵活、非接触操控能力,展现出作为多功能软体机器人的应用前景。
作者简介
桑胜波,太原理工大学副校长,教授,博士生导师,国家优青基金获得者,国家重点研发计划项目首席科学家,十三五“国家重大科学仪器设备”重点专项专家组专家,山西省“青年三晋学者”特聘教授。人工智能微纳传感山西省重点实验室主任,中国生物医学工程学会医学人工智能分会委员。主要从事微纳传感器与测试系统、仿生技术与装备、微结构的原位加工技术与装备研究。在 Advanced Materials、Nature Communications、Informat、Small 等期刊发表高水平论文 200 余篇,授权发明专利 100 余项(美国专利 4 项)。获山西省自然科学奖一等奖 1 项、山西省科学技术发明奖一等奖 2 项、山西省专利奖一等奖 1 项。出版教材 2 部、主持山西省教学改革项目 3 项、获山西省教学成果奖特等奖 1 项,获批国家级一流专业 1 个、国家级一流课程 1 门。
马佳楠,太原理工大学副教授、硕士生导师,研究领域为柔性电子学,重点围绕柔性传感器、刺激响应执行器的设计与制备及其在柔性机器人领域的应用开展研究工作,取得了一系列创新性研究成果,在 Advanced Functional Materials、National Science Review、Science Bulletin、Nano Letters 等国内外权威学术期刊上发表高水平论文 20 余篇,申请专利 6 项。主持国家自然科学基金青年项目、博士后面上项目、山西省青年科学研究项目等,入选太原理工大学“青年科学家”。
文章信息
Ma B, Ma J, Wang K, et al. Programmable multi-responsive MXene actuator based on micro-ridge structures. Nano Research, 2025, https://doi.org/10.26599/NR.2026.94908346.

识别二维码或点击左下角“阅读原文”可访问全文


