单像素成像(SPI)以单探测器替代传统阵列探测器,通过空间光调制与压缩采样实现多维成像,突破了奈奎斯特采样定理限制,在可见光、红外、太赫兹、X射线及3D成像等领域展现巨大潜力。压缩感知单像素成像(CSSPI)通过随机或结构化测量矩阵对目标进行编码采样,再利用稀疏重建算法恢复图像,其核心在于测量矩阵的RIP特性与重建算法的优化求解。然而,现有研究多聚焦压缩感知或单像素成像的单一维度,缺乏对二者结合后测量矩阵与重建算法系统性性能对比,制约了CSSPI技术的工程化应用与进一步优化。2023年5月,太原理工大学团队在《Sensors》期刊发表了题为"Comparison of Common Algorithms for Single-Pixel Imaging via Compressed Sensing"的综述论文。该工作系统梳理了CSSPI原理,分类总结了随机矩阵、部分正交矩阵及半确定性随机矩阵三类测量矩阵,以及凸优化、贪婪、非凸优化、Bregman距离最小化和全变分最小化五类重建算法;通过"摄影师"标准图像的仿真与"四条纹""瓢虫"真实实验,定量对比了各矩阵与算法在不同采样率(20%-100%)及噪声水平(-5dB至35dB)下的PSNR、SSIM与运行时间,发现TVAL3算法综合性能最优,为CSSPI系统优化设计提供了重要参考。
图文简介
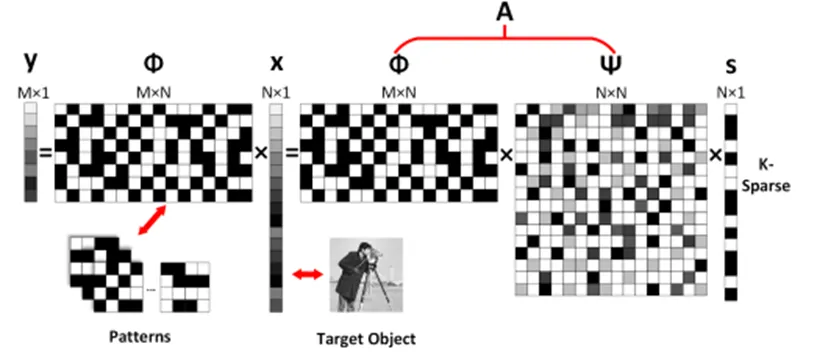
图1:CSSPI原理示意图,展示测量矩阵Φ对目标x的线性采样过程y=Φx=As,以及通过稀疏字典Ψ将图像重建转化为l0范数最小化问题的数学框架。
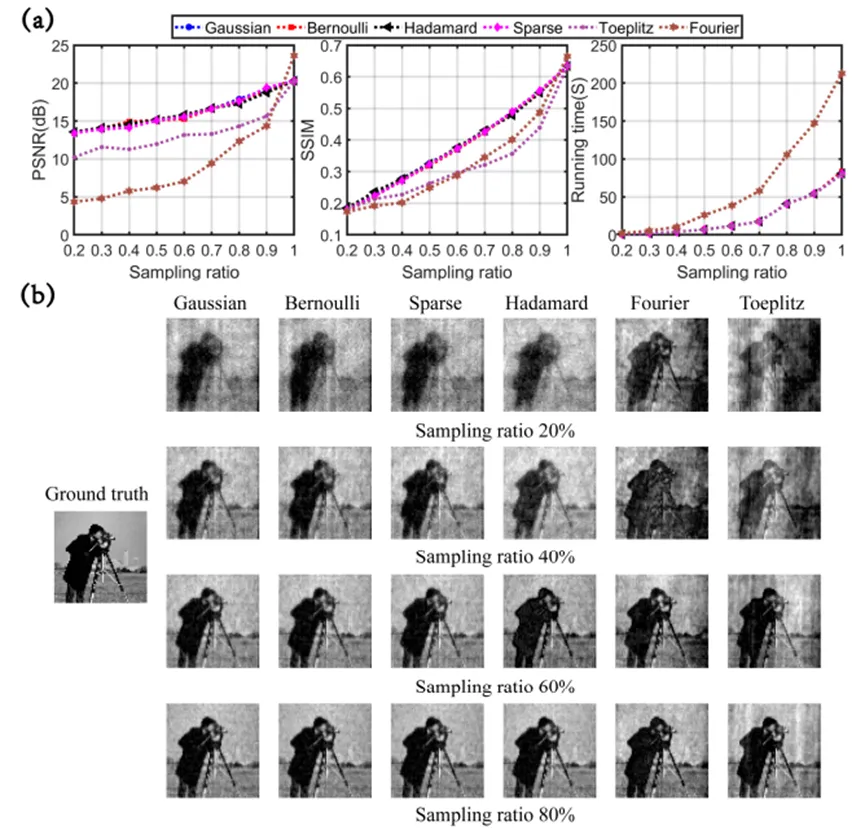
图2:六种测量矩阵(高斯、伯努利、哈达玛、稀疏、托普利茨、傅里叶)在不同采样率下的PSNR、SSIM及运行时间曲线,以及20%-80%采样率对应的重建图像对比。
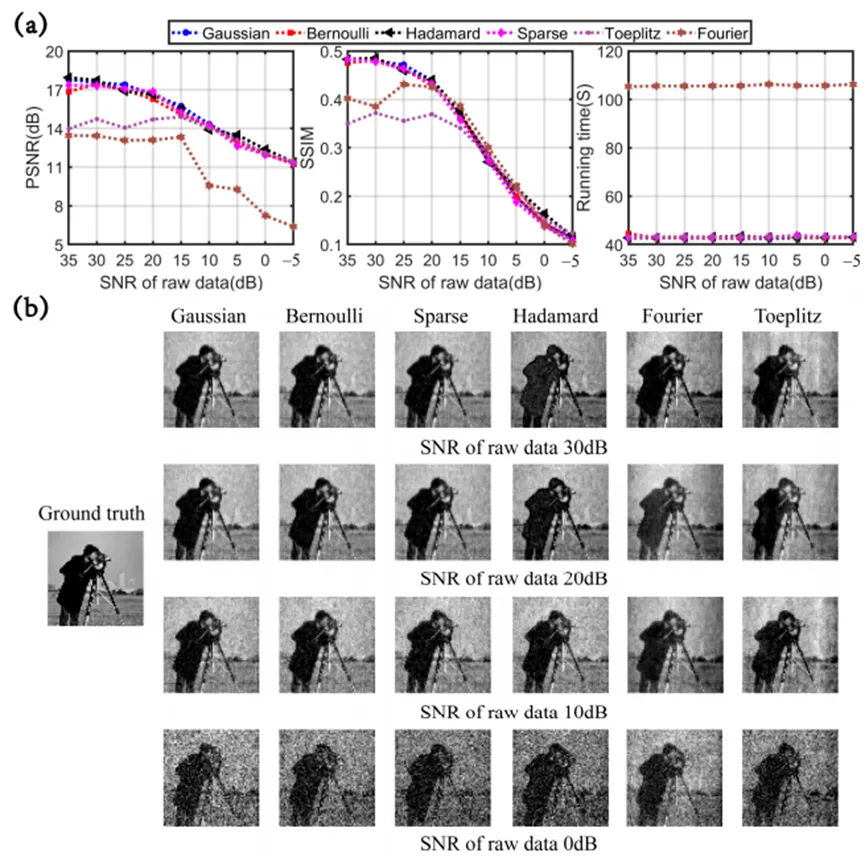
图3:六种测量矩阵在80%采样率下,面对30dB至0dB不同SNR高斯噪声时的抗噪性能曲线与重建图像对比。
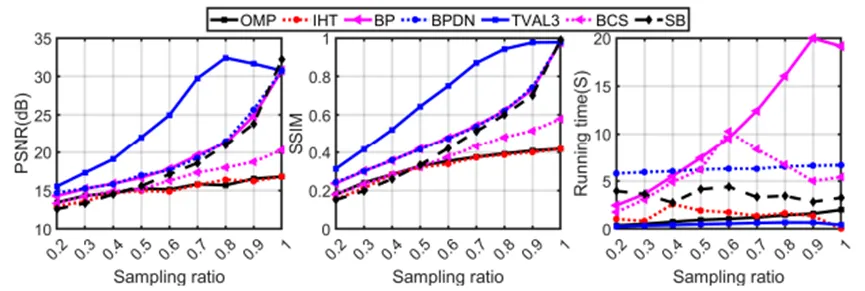
图4:七种代表性重建算法(OMP、IHT、BP、BPDN、TVAL3、BCS、SB)在不同采样率下的PSNR、SSIM及运行时间定量对比曲线。
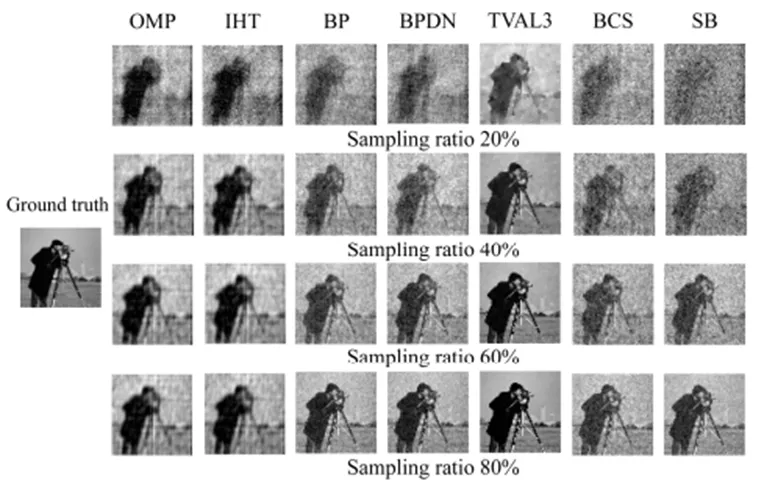
图5:七种算法在20%-80%采样率下重建"摄影师"图像的视觉质量对比。
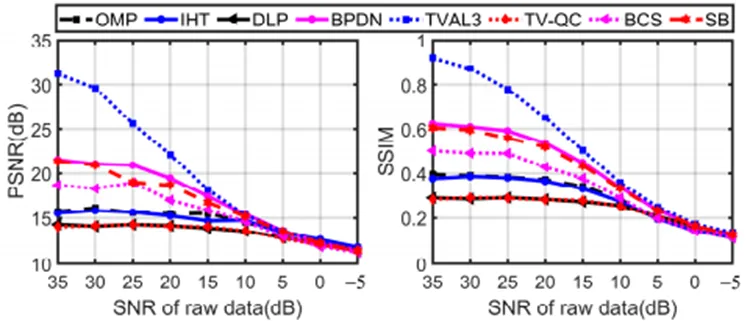
图6:各算法在80%采样率、不同SNR噪声条件下的PSNR与SSIM抗噪性能曲线。
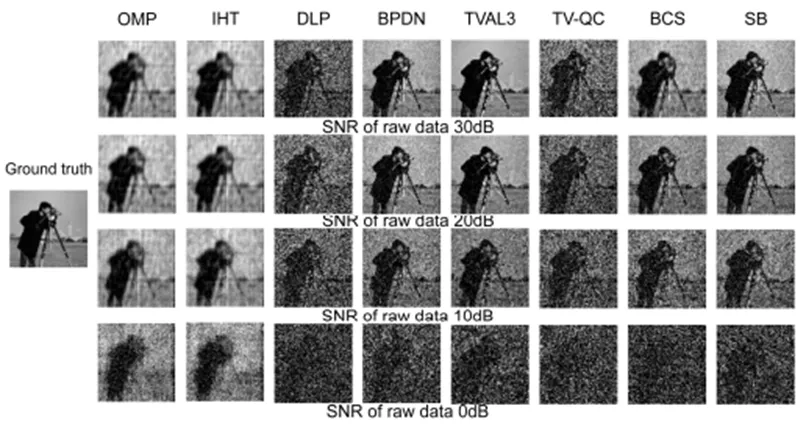
图7:八种算法在30dB至0dB噪声下重建图像的视觉对比,显示贪婪算法在低SNR下仍可辨识轮廓。
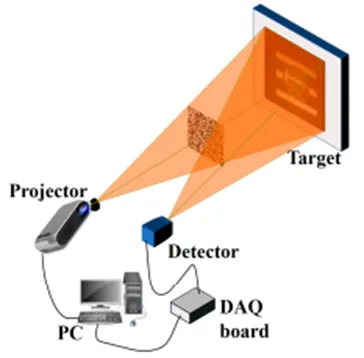
图8:实验装置示意图,包含投影仪、单像素探测器、数据采集卡及计算机组成的CSSPI系统。
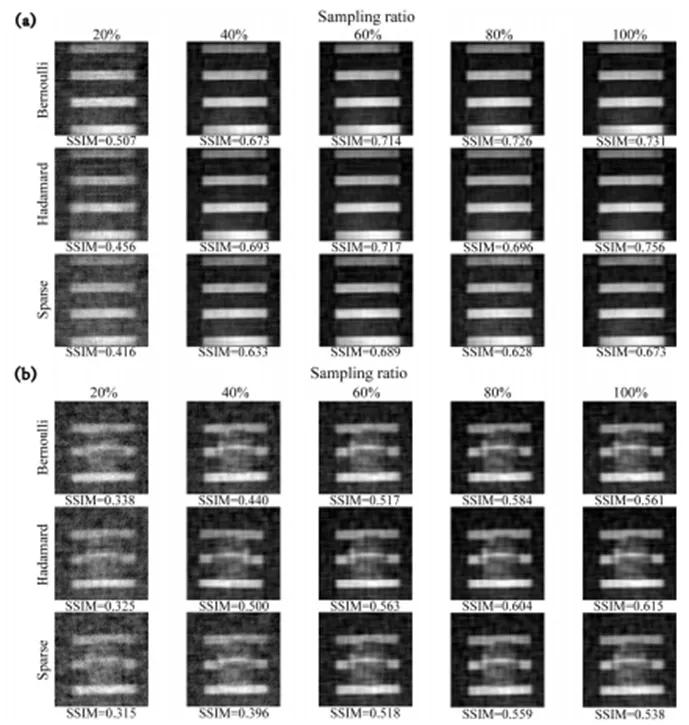
图9:伯努利、哈达玛、稀疏三种测量矩阵对"四条纹"和"瓢虫"目标在不同采样率下的实验重建结果及SSIM值。
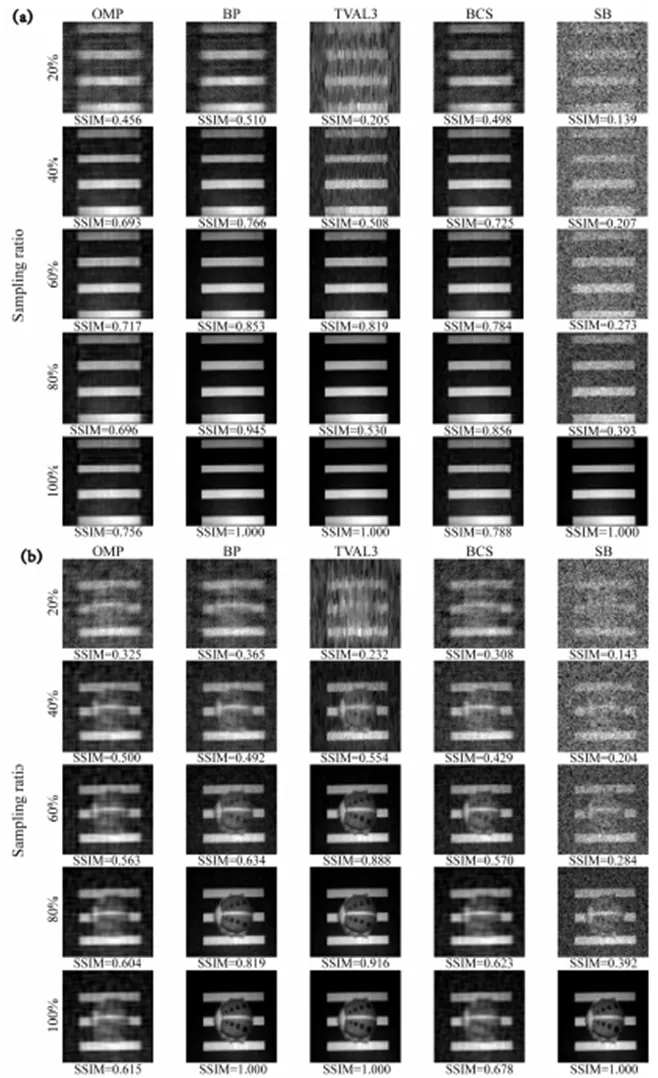
图10:OMP、BP、TVAL3、BCS、SB五种算法对两类目标在不同采样率下的实验重建结果及SSIM值。
该文首次系统对比了主流测量矩阵与重建算法在CSSPI中的实际表现,揭示TVAL3凭借梯度稀疏先验在成像质量与效率间取得最佳平衡,而贪婪算法在低信噪比下展现意外鲁棒性。研究启发未来CSSPI发展应朝三方向突破:引入局部非线性测量增强抗噪性、融合信号稀疏性与结构化先验提升重建精度、利用机器学习端到端优化测量-重建联合框架,以实现采样效率与成像质量的帕累托最优。
一句话评价:"算法选得好,单像素也能拍出高清大片——这篇综述告诉你该用哪把'钥匙'。"
阅读原文:
https://doi.org/10.3390/s23104678