太原理工联合新加坡国立大学团队:自供能水凝胶电子皮肤,实现多模态传感闭环人机交互
近日,太原理工大学与新加坡国立大学的联合研究团队在《Nature Communications》发表重要研究成果,成功开发出一种单组分聚乙烯醇(PVA)水凝胶电子皮肤。该电子皮肤创新性整合热电化学、压电离子和扩散效应,实现体温、动脉脉搏、汗液分泌的自供能多模态传感,还通过机器学习实现信号解耦,并开发出腕带式交互接口,落地闭环人机交互应用,为柔性电子与智能人机交互领域提供了全新的材料平台和技术方案。1. 仿生人皮设计,单组分水凝胶实现自供能多模态传感
人体皮肤是无缝集成的多模态传感系统,能同时感知温度、压力、生化标记等多种刺激,而传统柔性电子皮肤往往依赖刚性材料、离散组件和外部电源,存在结构复杂、穿戴性差、信号耦合等问题。为突破这一困境,研究团队以 PVA 为核心制备单组分水凝胶电子皮肤,将热电化学、压电离子和扩散三种效应融合于单一材料体系,首次实现了皮肤温度、动脉搏动和汗液分泌的同步自供能传感,其水凝胶还具备超 800% 的高拉伸性和低于 300kPa 的低模量,能与人体皮肤实现柔软贴合的共形接触,精准捕捉细微生理信号。这款水凝胶电子皮肤的传感机制高度模仿人体皮肤的受体工作原理,实现了对生物传感系统的精准复刻。其中,基于热电化学效应的温度传感模拟游离神经末梢的离子电流行为,压电离子效应驱动的脉搏监测复刻默克尔细胞的机械敏感响应,而基于扩散效应的盐离子浓度检测则借鉴了鲁菲尼末梢的拉伸敏感信号传导方式。值得一提的是,这三种物理效应不仅支撑各自的传感功能,还能为水凝胶传感单元提供自供能力,使其可主动生成刺激响应电信号,摆脱了对外部电源的依赖。2. 材料与结构创新,解锁水凝胶优异性能
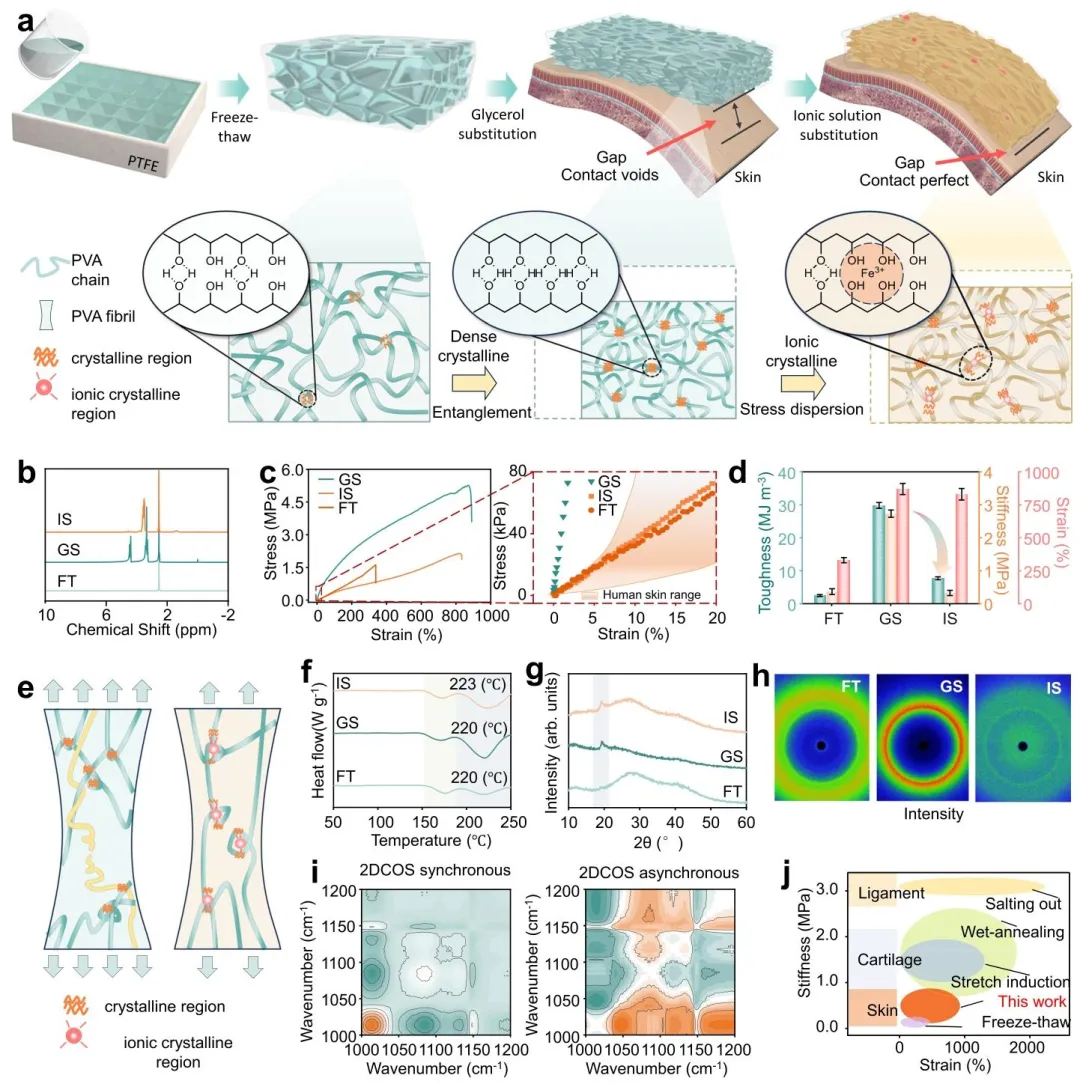
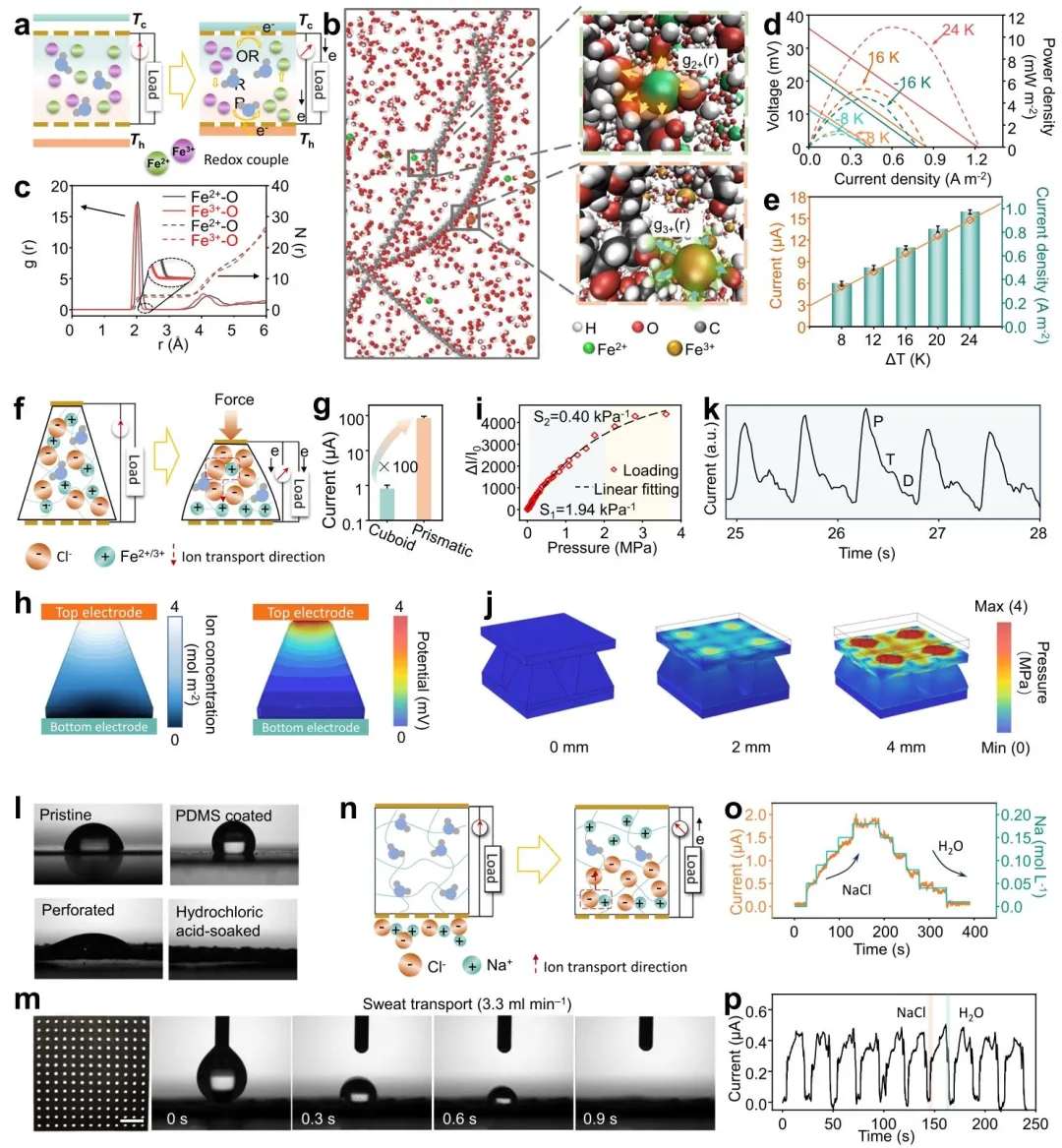
研究团队通过创新的制备策略和结构设计,让 PVA 水凝胶兼具高力学性能和优异的传感特性,解决了传统水凝胶 “韧性与柔软性不可兼得” 的难题。团队采用冷冻解冻结合序贯溶剂替换的方法制备水凝胶,先将 PVA 粉末溶解于二甲基亚砜并经冷冻解冻形成初步网络,再通过甘油替换实现分子链的致密缠结,最后用三价铁离子水溶液替换甘油,形成最终的离子型 PVA 水凝胶。该策略实现了水凝胶结晶度与刚度的解耦,其结晶度保持在 25.2%,模量却降至人体皮肤范围,且断裂能较单纯冷冻解冻的水凝胶提升 9 倍,兼顾了高拉伸性和结构稳定性。棱柱形微结构设计则成为水凝胶传感性能的 “放大器”,也是此次研究的另一大结构创新。团队将 PVA 水凝胶设计为棱柱形架构,使机械应力集中在结构尖端,还能在皮肤法向方向协同热电化学、压电离子和扩散三种效应,有效放大了应力诱导的离子极化效应。这一设计让水凝胶的输出电流从 0.7μA 大幅提升至 100μA,机械灵敏度(GF)超过 18.7,同时未破坏水凝胶与皮肤的贴合性,进一步提升了对微弱生理信号和外界刺激的感知能力。3. 机器学习赋能,实现多模态信号精准解耦
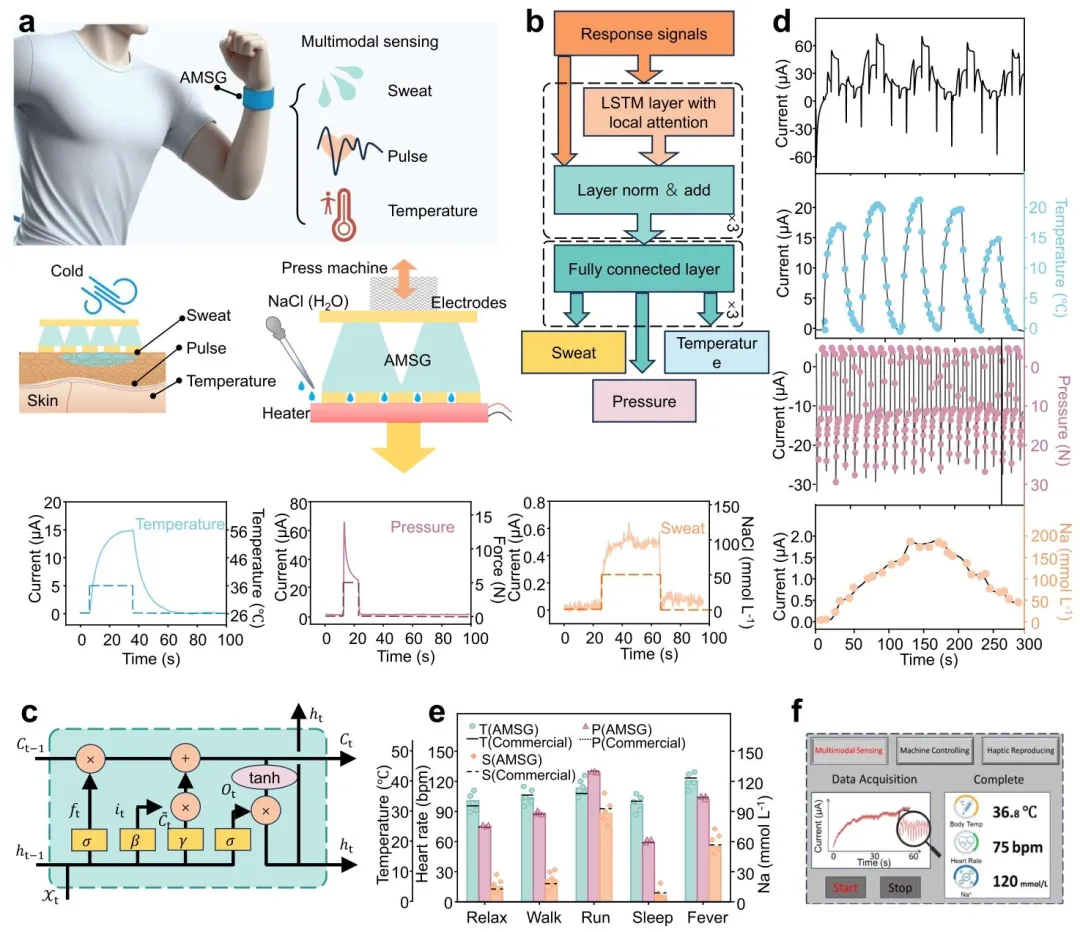
多模态传感的核心难题在于不同信号之间的串扰,而研究团队通过深入分析信号的物理起源,为机器学习解耦奠定了坚实的实验基础。研究发现,水凝胶中压力传感的压电离子信号源于机械诱导的瞬态离子极化,而温度的热电化学信号、汗液的扩散信号均为稳态过程,三者的响应机制相互独立,压力信号几乎不受温度和汗液钠离子浓度变化的影响;仅温度与汗液信号存在轻微相互作用,且在实验温度范围内均处于线性区间,信号贡献可按比例叠加,形成稳定可预测的电流响应。为实现复合信号的精准分离,团队开发了带有局部注意力的时序机器学习模型,构建了以三层长短期记忆网络(LSTM)为核心的信号解耦架构。该模型设置了 [t-40, t+40] 的局部注意力窗口,聚焦关键时间域的特征提取,同时降低了远端噪声的干扰和计算复杂度,后续还搭配三层全连接层完成信号特征的映射与解耦。在 3000 时间步的测试中,该模型对温度和压力传感的平均绝对误差均低于 2%,即便汗液钠离子的传感信号相对微弱,其检测误差也能控制在 30% 以内,成功实现了多模态复合信号的实时精准解耦。4. 腕带式交互接口落地,闭环人机交互成为现实
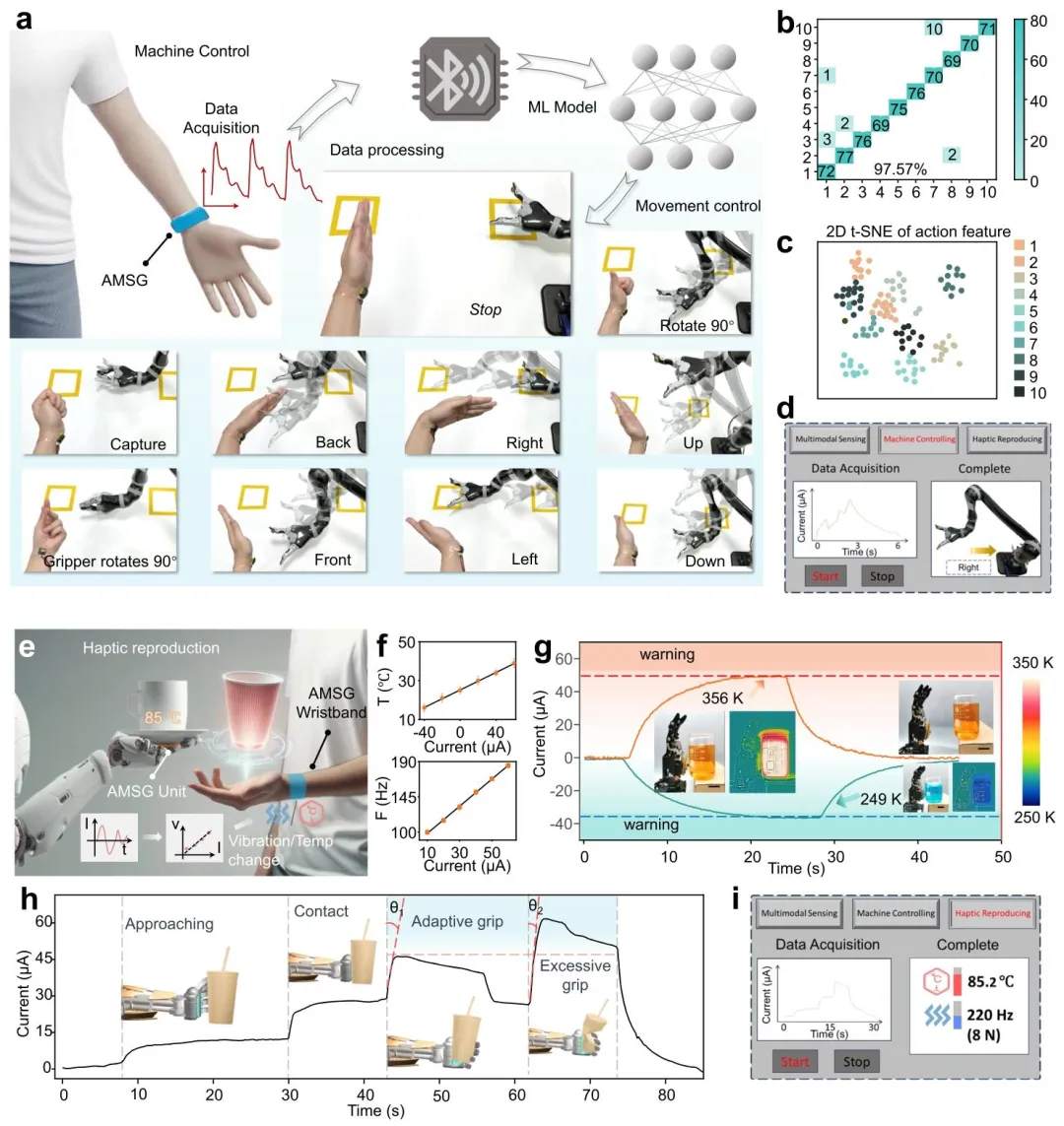
基于这款自供能水凝胶电子皮肤,研究团队开发出有源多模态信号发生器(AMSG)腕带,将其打造为集生理监测与人机交互于一体的柔性智能接口。这款腕带实现了 “感知 - 控制 - 反馈” 的闭环人机交互,让柔性电子皮肤从生理监测走向实际应用。一方面,腕带可检测手腕肌肉收缩产生的压力信号,结合基于一维卷积神经网络的 ResNet-34 框架,对 10 种手腕手势的识别准确率达 97.57%,能将手势信号转化为指令实现对机械臂的实时控制;另一方面,团队在机器人端也部署了同款水凝胶传感单元,可捕捉机器人操作时的温度和压力变化,并通过腕带的热执行器和线性电机,将这些信息转化为触觉反馈传递给用户。此外,腕带还集成了热防护和自适应抓握功能,能对高温、低温等危险环境实时预警,还可根据压力信号调整抓握力度,避免损坏操作对象。该研究通过材料、结构与算法的协同创新,突破了传统多模态电子皮肤在集成度、自供能、信号解耦方面的核心瓶颈,所开发的水凝胶电子皮肤和腕带式交互接口,在实时健康监测、智能假肢、软机器人、沉浸式虚拟现实等领域展现出广阔的应用前景。这一成果也为后续开发仿生人皮的柔性电子器件提供了全新思路,推动了智能人机交互技术向更贴合人体、更智能高效的方向发展。图 1 聚乙烯醇水凝胶电子皮肤的合理设计及其与有源多模态信号发生器腕带接口的集成。a 水凝胶电子皮肤的示意图及其多模态传感机制,并与人体皮肤的传感机制进行对比:(1)用于温度传感的热电化学效应,模拟游离神经末梢通过热敏离子通道(如瞬时受体电位通道)对温度产生的离子响应;(2)压电离子传感通过机械门控离子通道,再现默克尔细胞和鲁菲尼末梢的机械敏感特性;(3)基于扩散效应的电解质传感,模拟游离神经末梢的化学敏感离子通道(如香草酸瞬时受体电位 1 通道、酸敏感离子通道等)的作用机制。b 在棱柱形结构设计中,将热电化学、压电离子和扩散效应协同整合。c 全集成式有源多模态信号发生器腕带及其结构总览,该腕带包含信号发生单元、信号再现单元以及信号处理和传输电路;其中右侧的有源多模态信号发生器核心单元由水凝胶基传感器阵列和多层封装层构成。d 该接口的多功能性示意图,包括对皮肤温度、脉搏波形和汗液钠离子浓度的实时监测,以及通过手势实现机器人控制、触觉反馈复现的人机交互功能。图 2 经序贯溶剂替换法制备的聚乙烯醇水凝胶的制备过程及材料性能。a 制备工艺示意图,包括冷冻解冻(FT)、甘油替换(GS)和离子替换(IS)三个步骤,通过该工艺可实现水凝胶网络的逐步强化。b 295 开尔文温度下,冷冻解冻、甘油替换、离子替换型水凝胶在氘代二甲基亚砜中的氢 - 1 核磁共振谱图。c 经不同溶剂替换处理后聚乙烯醇水凝胶的拉伸应力 - 应变曲线,并与人体皮肤的力学性能范围进行对比(橙色阴影区域为人体皮肤范围)。d 不同处理工艺下水凝胶的韧性与刚度变化情况。e 水凝胶的力学增强机制示意图,该机制主要与致密结晶区和离子结晶区的协同作用相关。f 冷冻解冻、甘油替换、离子替换型水凝胶的差示扫描量热法热分析曲线。g 冷冻解冻、甘油替换、离子替换型水凝胶的 X 射线衍射图谱。h 展示冷冻解冻、甘油替换、离子替换型水凝胶结晶度演变过程的广角 X 射线散射图谱。i 冷冻解冻、甘油替换、离子替换型水凝胶的二维相关光谱同步和异步图谱,其中红色代表正强度信号,蓝色代表负强度信号。j 本研究制备的水凝胶与各类已报道水凝胶、生物组织的韧性对比。
图 3 多模态传感性能及作用机制。a 作为温度传感机制的热电化学效应示意图。b 聚乙烯醇分子链结构及其在亚铁离子 / 铁离子周围的溶剂化行为的分子动力学模拟图,插图为第一溶剂化壳层结构。c 聚乙烯醇水凝胶中,铁离子和亚铁离子周围氧原子的径向分布函数 g (r)(实线)与配位数 N (r)(虚线)。d 不同温度梯度下,水凝胶的输出电压 - 电流曲线及对应的功率密度。e 输出电流和电流密度随温度差的变化关系。f 用于压力传感的压电离子效应示意图。g 利用棱柱形结构实现 d₃₃模式下压电离子输出信号的增强。h 压力作用下,离子浓度梯度与电势分布的 COMSOL 模拟图。i 聚乙烯醇水凝胶在形变程度增大时应力分布的 COMSOL 模拟图。j 相对电流变化随外加压力的变化关系。k 桡动脉脉搏检测得到的波形信号。l 不同碳纸表面的接触角测试结果:原始碳纸、聚二甲基硅氧烷涂覆碳纸、多孔碳纸以及盐酸处理碳纸。m 汗液传输电极的俯视图及其传输性能曲线(比例尺:1 毫米)。n 用于汗液检测的扩散效应示意图。o 水凝胶输出电流对不同汗液钠离子浓度的响应曲线。p 交替加入氯化钠溶液和纯水的 10 个循环中,水凝胶的重复电流响应曲线。
图 4 基于机器学习模型解耦的多模态生理传感。a 有源多模态信号发生器腕带接口用于体温、脉搏率和汗液分泌多模态传感的示意图,通过分别施加温度、压力和钠离子电解质刺激,获取各刺激对应的特征信号以模拟该传感过程。b 基于机器学习的信号解耦模型架构,该模型包含三层带局部注意力机制的长短期记忆网络,以及三层全连接层,可独立提取并解耦每种刺激对应的信号特征。c 长短期记忆网络的内部结构。d 多种刺激同时作用下的复合信号与其解耦后的各单信号组分对比图。e 针对放松、行走、跑步、睡眠、发烧五种不同活动状态,开展的体温、脉搏率及汗液钠离子浓度多模态监测结果,并与商用设备的监测数据进行对标验证。f 可显示多模态信号实时波形及对应监测结果的用户交互界面。
图 5 基于手势操控机器人与触觉反馈复现的闭环人机交互演示。a 利用有源多模态信号发生器腕带采集手势信号,结合深度学习模型解析信号,实现对机械臂的实时操控。b 基于 200 组测试样本的电流信号序列得到的混淆矩阵,该矩阵展示了 10 种不同手势的分类识别准确率。c 10 种手势的主成分分析结果。d 可显示手势指令对应的电流信号及机械臂相应运动输出的用户交互界面。e 应用场景示意图:机器人端有源多模态信号发生器检测到的温度和压力信号,在用户佩戴的腕带端实现触觉反馈复现。f 依据电流幅值对温度和振动反馈响应进行调控。g 结合光学图像与红外图像,展示机械臂靠近或远离热源、冷源时,有源多模态信号发生器的电流响应信号。h 机械臂抓取纸杯过程中的电流信号变化,通过电流幅值和切线角度的变化判断信号聚类差异,以此确定合适的抓取力度。i 可显示触觉信号实时波形及触觉反馈复现相关参数的用户交互界面。
原文链接:https://doi.org/10.1038/s41467-026-69450-9公众号可进行XPS,XRD,SEM,原位TEM,傅里叶红外,力学,电学,生物测试等表征测试与分析;光电器件,柔性电子器件等器件的COMSOL仿真分析;人工智能算法复现;薄膜晶体管、光电器件功能层的制备及其器件掩模板的设计与实现。本公众号发布的所有内容(含文字、图片、视频、音频、设计素材等),若涉及侵权,请及时与我们联系,我们将第一时间处理删除。我们始终尊重知识产权,严格恪守《中华人民共和国著作权法》及相关法律法规,全力维护健康有序的内容创作生态。欢迎大家投稿和私信,联系邮箱:aida2077@163.com