作为将外部压力转换为电信号的装置,柔性压力传感器对于实现人体健康监测、运动检测、智能机器人以及人机交互中的触觉感知至关重要。近年来,随着可穿戴设备在实用性、高精度和长续航能力方面的不断进步,开发兼具宽线性范围和高灵敏度的柔性压力传感器已成为柔性电子领域的重要研究方向和关键技术瓶颈。高灵敏度能够精确检测细微的压力变化,而宽线性响应范围则确保传感器输出与施加的压力保持直接比例关系,从而简化信号分析,无需复杂的数据处理。
在各种压力传感机制中,压阻式压力传感器因其结构设计简单、制造工艺便捷、输出信号稳定以及与柔性电路的优异兼容性而备受关注。压阻式传感器的工作原理通常是将机械刺激转化为可测量的电阻变化,这种变化主要源于内部导电网络的调整、界面接触电阻的变化或微观结构的变形。近年来,研究重点集中在探索各种传感材料以提高柔性压阻式传感器的传感性能。诸如炭黑、石墨烯、碳纳米管(CNTs)、金属纳米颗粒和MXene等多种导电填料已被嵌入弹性体基体中,用于制备复合材料,应用于传感器领域。然而,这些聚合物-填料复合材料通常难以同时满足宽检测范围和高灵敏度的双重要求。对于这些聚合物-填料复合材料,灵敏度主要取决于弹性模量。较高的模量可以拓宽检测范围,但会牺牲灵敏度;而较低的模量可以提高灵敏度,但会限制测量大应力的能力。因此,需要能够在不同范围内发生显著形变的复合材料,从而实现电阻的显著变化。
为了解决这一难题,一种有效的方法是设计在不同压力条件下具有连续变化接触状态的混合微结构,旨在实现灵敏度和线性传感范围之间的最佳平衡。例如,Zhang等人设计了一种由双电阻敏感层组装而成的Janus导电结构,用于压阻式传感器,从而实现了超宽线性检测范围(高达3800 kPa)和约4 kPa⁻¹的适中灵敏度。Zhou等人也进行了类似的研究。研究人员开发了一种高性能柔性压力传感器,其灵敏度为 24.6 kPa⁻¹,线性范围高达 1400 kPa。该传感器采用金字塔形碳泡沫阵列作为传感层,弹性间隔层则起到刚度调节器的作用。受人体皮肤高灵敏度微结构的启发,Wan 等人开发了 MXene 修饰的海胆状微结构,用于制造柔性电子传感器。该传感器灵敏度高达 784.02 kPa⁻¹,但压力范围仅为 ≈20 kPa。Zhou 等人则利用具有多孔互锁结构的双层导电材料构建了一种灵敏度高达 924.4 kPa⁻¹ 的压力传感器。然而,这种优异的性能仅限于 70 kPa 以下的狭窄压力范围。尽管这些研究在一定程度上提高了传感器的灵敏度或拓宽了线性传感范围,但固有的矛盾依然存在:高灵敏度通常仅限于低到中等压力范围,而更宽的线性范围往往会牺牲灵敏度。因此,设计能够同时提供高灵敏度和超宽线性检测范围的柔性压阻式压力传感器是一项核心挑战。
1. 本工作提出了一种基于MXene的多级微穹顶(MSM)结构的柔性压阻传感器,实现了高灵敏度和宽响应范围。
2. 得益于该结构的多级压缩和逐步接触特性,所制备的MXene基柔性压力传感器实现了高达2500 kPa的超宽检测范围和11.57 kPa⁻¹的高灵敏度。
3. 结合深度学习算法,所设计的掌形和足底形传感器阵列能够有效识别摩尔斯电码、物体抓取和人体运动,识别准确率超过95%。
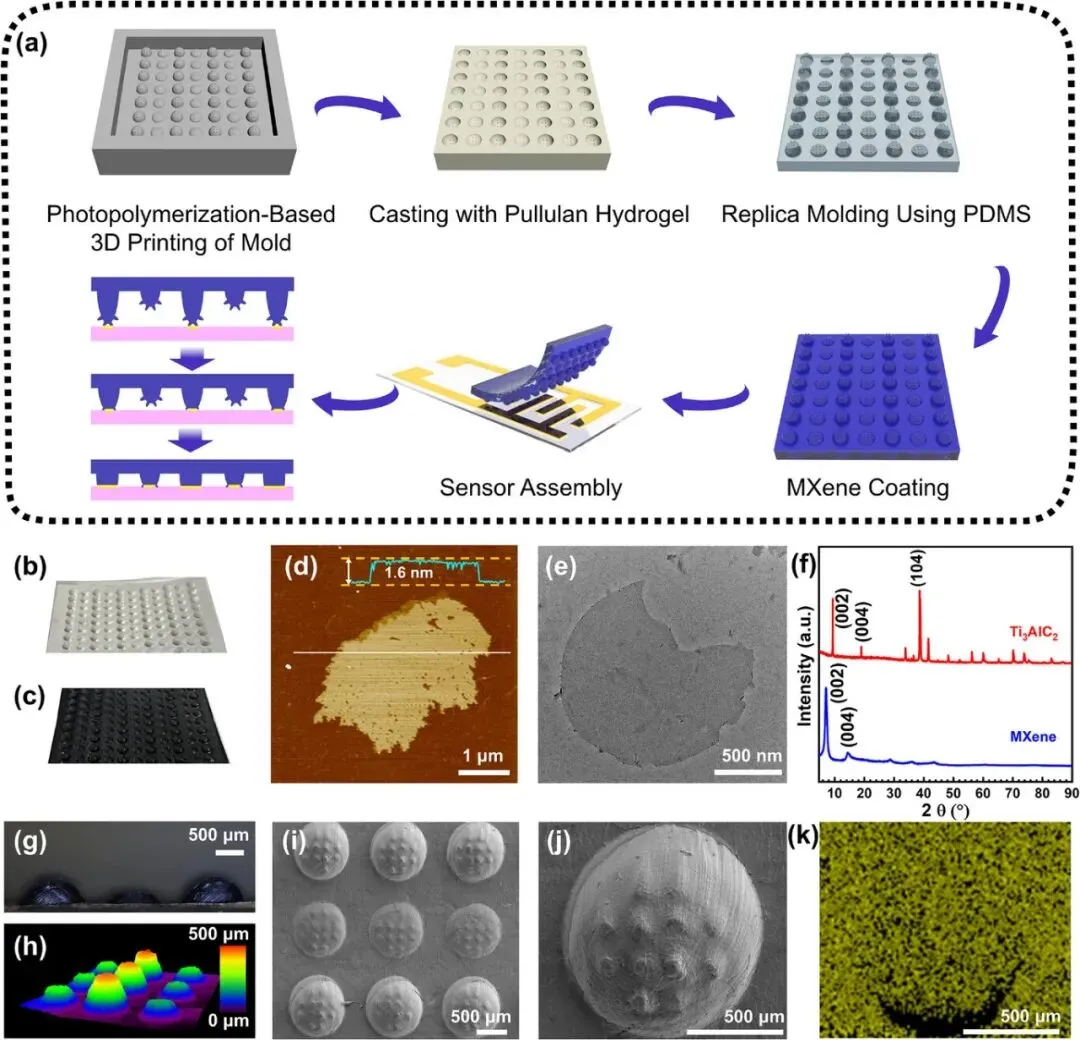
图1. MSM结构压力传感器的制备工艺及结构表征。(a) MSM结构柔性压力传感器的制备工艺示意图。(b) 未涂覆MXene的MSM结构PDMS薄膜照片。(c) 涂覆MXene后的MSM结构PDMS薄膜照片。(d) MXene薄片的原子力显微镜(AFM)图像。(e) MXene纳米片的透射电镜(TEM)图像。(f) Ti3AlC2和MXene的X射线衍射(XRD)图谱。(g) 主/次微穹顶高度比为1:0.5的MSM结构的侧视显微照片。(h) 主/次微穹顶高度比为1:0.5的MSM结构的三维光学显微镜扫描图像。(i) 传感器整体的扫描电镜(SEM)图像。(j) 单个微穹顶的放大SEM图像。 (k) 单个微穹顶的EDS映射中Ti元素的分布图。
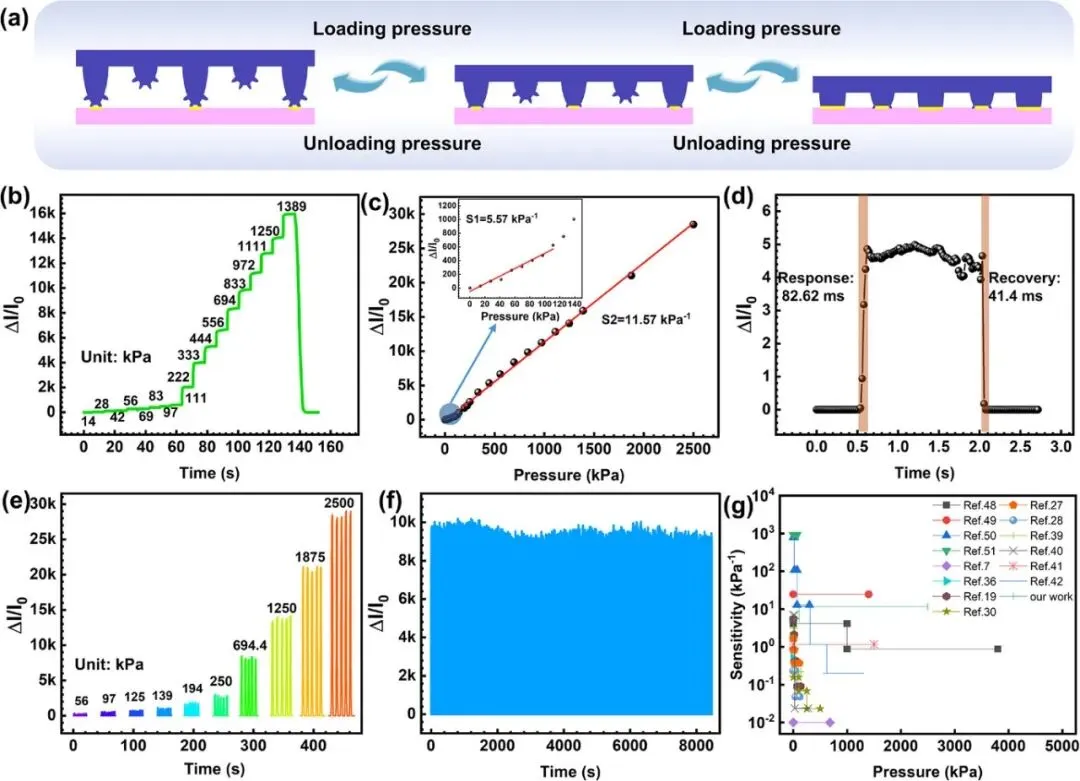
图2. MSM结构压力传感器的传感机制和性能表征。(a) MSM结构压力传感器的工作原理示意图。(b) 传感器在14至1389 kPa压力范围内的ΔI/I0-压力曲线。(c) 传感器在不同外部压力下的灵敏度。(d) 传感器在1.4 kPa压力下的响应和恢复时间曲线。(e) 传感器在不同压力下的重复性输出波形。(f) 传感器在833 kPa压力下(约2900次压力循环)的耐久性测试结果。(g) 基于MSM的传感器与先前报道的传感器的灵敏度和量程比较。
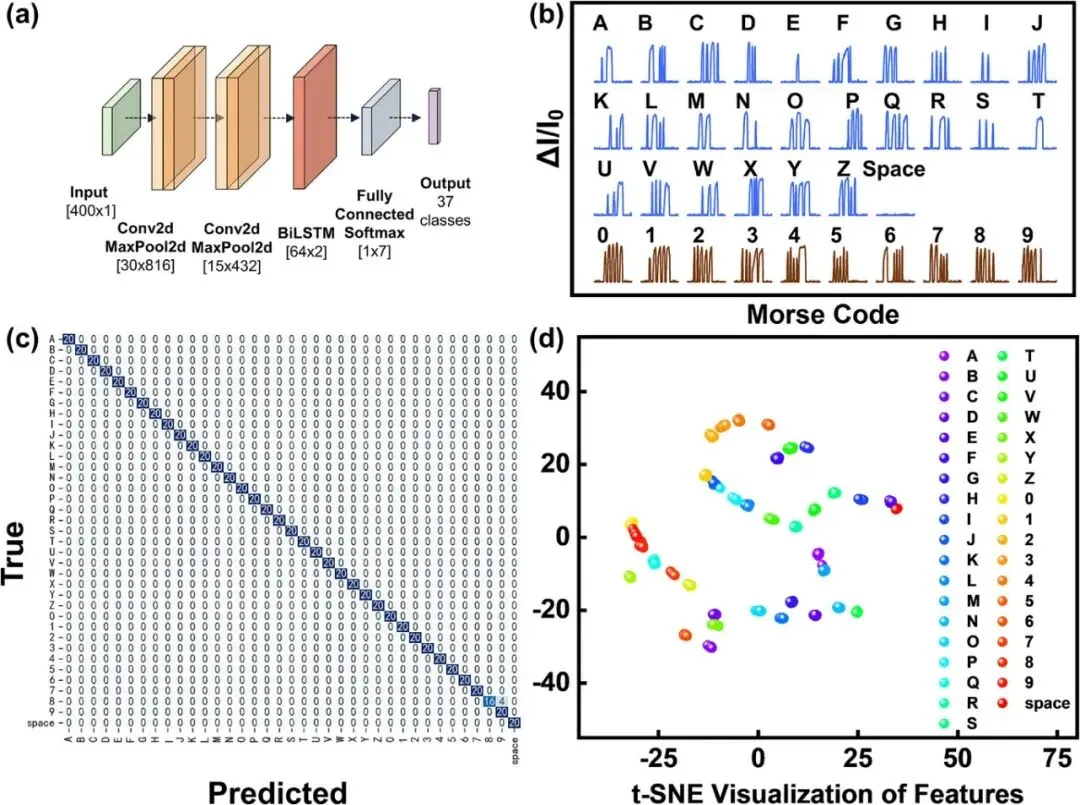
图3. 基于MSM结构传感器的莫尔斯电码识别。(a) CNN-BiLSTM模型架构示意图。 (b) 单个传感器采集的摩尔斯电码按键信号示意图(“-”和“.”通过按键持续时间区分)。(c) 经过50个训练周期后的混淆矩阵(测试准确率:99.5%)。(d) t-SNE降维可视化图,展示了不同类别的特征分布。
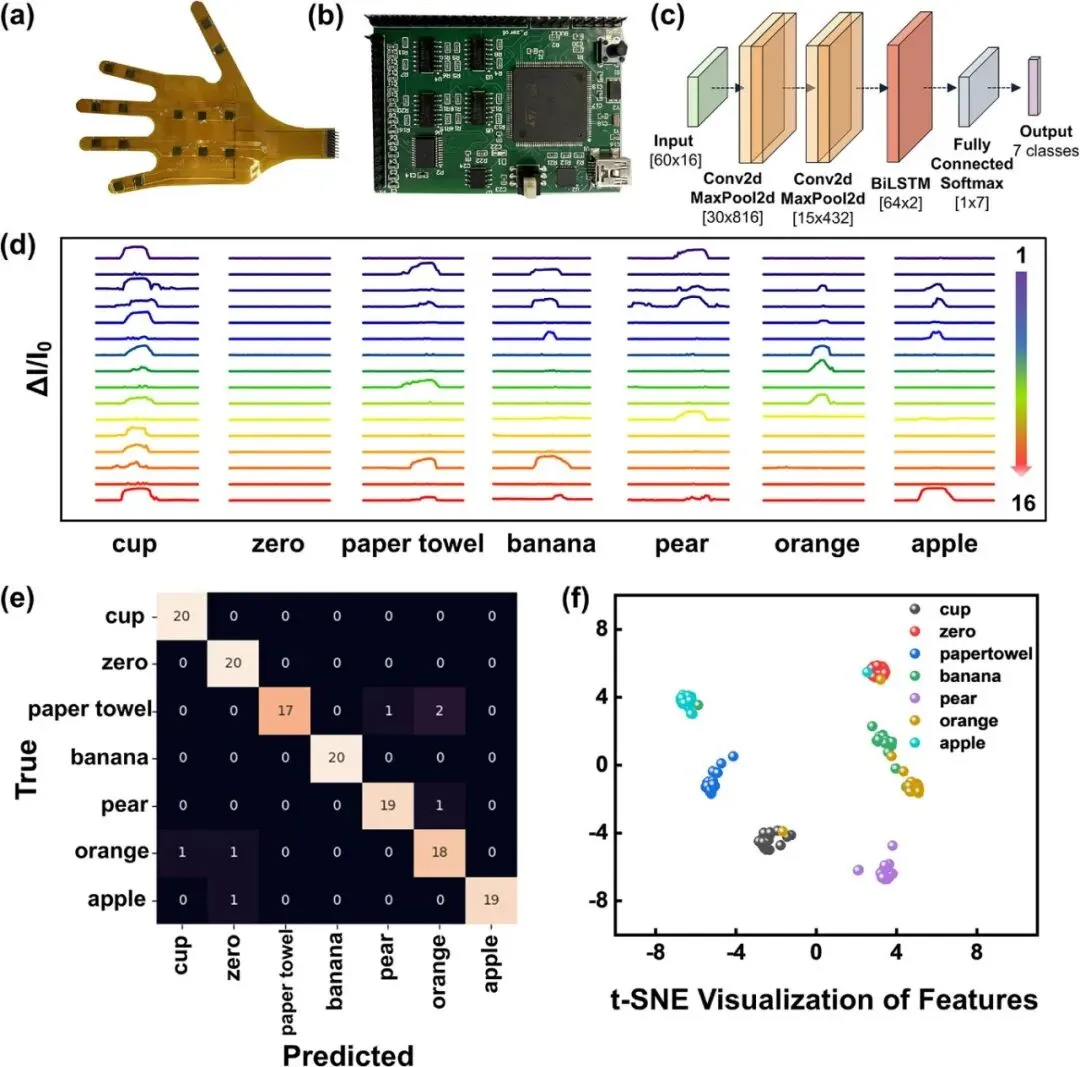
图4. 基于MSM结构的掌形传感器阵列的物体抓取识别。(a) 16通道掌形传感器阵列照片。(b) 基于STM32F407的16通道信号采集电路板照片。(c) CNN-BiLSTM模型架构示意图。(d) 掌形传感器阵列抓取不同物体时的输出信号示例。(e) 经过50个训练周期后的混淆矩阵(测试准确率:95%)。(f) t-SNE降维可视化图,展示了不同物体类别的特征分布。
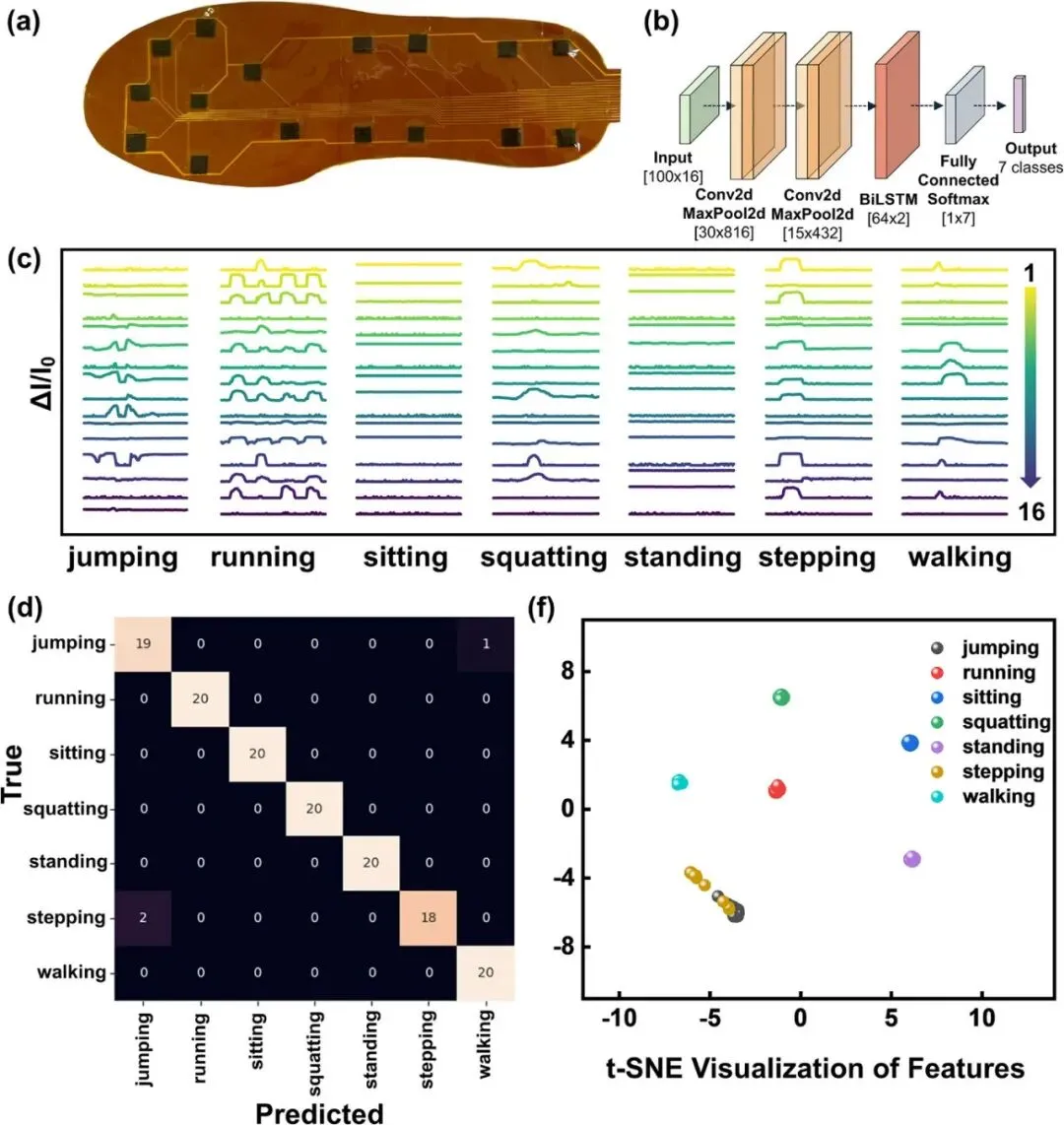
图5. 基于MSM结构的鞋底形传感器阵列的运动模式识别。(a) 16通道鞋底形传感器阵列照片。(b) CNN-BiLSTM模型架构示意图。(c) 不同运动模式下鞋底形传感器的输出信号。(d) 50个训练周期后的混淆矩阵(测试准确率:97.9%)。(e) t-SNE降维可视化图,展示了不同运动模式下的特征分布。