[超材料顶刊-68]太原理工大学《Adv Funct Materials》:形状即性能-一种可编程的机械超材料
形状不仅是自然生物适应环境的关键手段,也是人工系统实现特定功能的底层蓝图。在机械超材料领域,形状变形能力为按需调控力学性能提供了可能。然而,现有研究大多局限于实现有限的形状变化或追求单一的性能目标,忽略了重构形状与力学响应之间的内在双向关联。其根本原因在于,缺乏能够将单一结构灵活、多样化地重编程为大量不同形状的设计策略,从而阻碍了形状-性能编码关系的系统性探究。针对这一空白,本研究提出了一种基于离散单元与摩擦互锁机制的新型机械超材料。不同于传统的连续连接方式,该设计使每个单元可独立调节,从而能将同一结构前体重构为任意数学曲面或复杂图案,并建立起每个形状与特定力学性能之间一一对应的“编码”关系。这一突破不仅为深入理解形状与性能的内在联系提供了理想平台,也为开发具有高度自适应性和可编程功能的智能结构开辟了新路径。一、解决的问题
现有形状变形机械超材料存在两个核心问题:一是重构形状的种类有限,难以形成系统研究形状与性能关系的数据库;二是大多数结构单元通过连续材料连接,无法高精度模拟具有复杂局部曲率的目标形状。此外,形状与力学性能之间的双向编码关系(即由形状可唯一确定性能,反之亦然)尚未被系统性地揭示和应用。
二、提出的方法
受肌腱-卯榫技术启发,作者提出了一种基于“独立单元”的设计策略。该结构由一系列离散的、具有凹凸结构(凸起和滑道)的单元组成,这些单元通过摩擦和互锁产生的机械相互作用连接,而非连续的原子键合。通过手动调整每个单元的垂直高度,可以独立控制局部变形,从而将整体结构从初始平面状态,重编程为任何数学定义的曲面(如平面、球面、马鞍面)或离散图案(如字母)。单元上的多段凸起设计增强了机械相互作用的可调性和稳定性。
三、实现的效果
形状可重构性:成功将10×10的单元阵列重构为26个英文字母、不同高度的平面、不同曲率的球面、马鞍面、金字塔面等多种规则及不规则的复杂形状。
形状-性能编码:通过压缩测试发现,每一种重构后的形状都对应一条独一无二的力-位移曲线。这些曲线如同“机械指纹”,证明了形状与力学性能(如结构刚度)之间存在一一对应的双向编码关系。研究还建立了能量吸收效率与曲面均方根高斯曲率之间的定量关系模型。
自适应与可调能量吸收:利用上述特性,该结构展现出卓越的冲击能量吸收能力。它能根据冲击物的形状(如球体、挖掘机铲斗)自适应地变形,完美贴合冲击物轮廓。同时,通过改变重构形状(如平面、球面、金字塔面),可以精确调控其能量吸收能力,实现从“轻柔触感”到“高效吸能”的宽范围调节。
多功能应用:基于其稳定性和可重构性,该结构还被成功演示为一种高密度、抗干扰的稳定机械存储器,以及一种可刷新的盲文触觉显示设备。
四、创新点
非连续连接设计范式:摒弃了传统的连续连接方式,采用基于摩擦和互锁的离散机械相互作用,使得结构单元可以独立变形而不影响相邻单元,为实现任意复杂形状重构提供了前所未有的自由度。
系统性揭示形状-性能双向编码:首次通过构建庞大的重构形状数据库,系统性地验证并利用了形状与力学性能之间的一一对应关系。这种编码机制为未来基于性能需求的逆向设计(即根据所需的力学响应推导出最优形状)奠定了基础。
自适应与可调吸能机制的集成:将形状可重构性与能量吸收功能深度耦合,实现了防护结构在遭遇未知形状冲击物时能被动自适应贴合,并能根据需求主动预编程为不同的吸能模式,克服了传统吸能材料功能单一的局限。
零能耗稳定机制:利用凸起与凹陷的完美匹配实现结构稳定,这种互锁带来的稳定性不依赖持续的能量输入或应力状态,与传统的双稳态或多稳态结构有本质区别。
研究成果以题为:《Mechanical Metamaterial With Shape-Encoded Reprogrammable Properties》发表于期刊《Advanced Functional Materials》。单位为:太原理工大学、伊利诺伊大学厄巴纳-香槟分校、宾夕法尼亚大学,第一作者为:太原理工大学Xiaoting Wang, Shilei Duan、伊利诺伊大学厄巴纳-香槟分校Wenjing Hao.摘要:
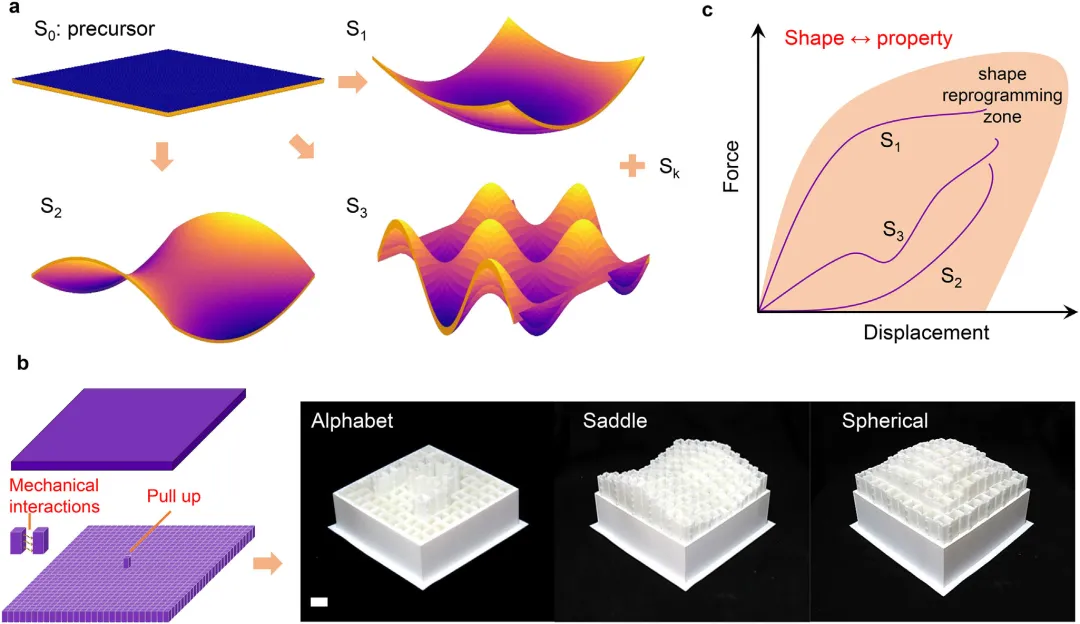
形状变形在自然和工程系统中普遍存在且至关重要,其中几何形状与性能之间存在着内在的相互依存与编码关系。已有多种策略被提出,用于探索机械超材料中形状与力学性能之间的关联。然而,很少有方法能够实现将结构重新配置为足够多样化的形状集合,从而系统性地研究形状-性能关系。受肌腱-卯榫技术的启发,我们引入了一种基于机械相互作用的构建策略,用于创建具有广泛可重构性的形状变形机械超材料。从单一的结构前体出发,我们的系统可以被便捷地重新配置和重编程,形成多种数学定义的曲面/形状。我们表明,这种变形能力源于离散结构单元之间由摩擦和互锁介导的非连续机械相互作用,这使得局部变形不会干扰相邻单元。此外,所有重构后的形状都与特定的力学响应形成唯一且一致的关联,从而产生了一个异常广阔的可调设计空间。利用这些耦合的变形与形状-性能特性,我们重点展示了其在具有前所未有适应性的冲击能量吸收方面的应用前景。最后,我们引入了多功能稳定机械存储器和可刷新盲文触觉显示设备的概念,凸显了所提出平台的多功能性。图1:提出的可重编程形状变形机械超材料及其形状-性能编码示意图
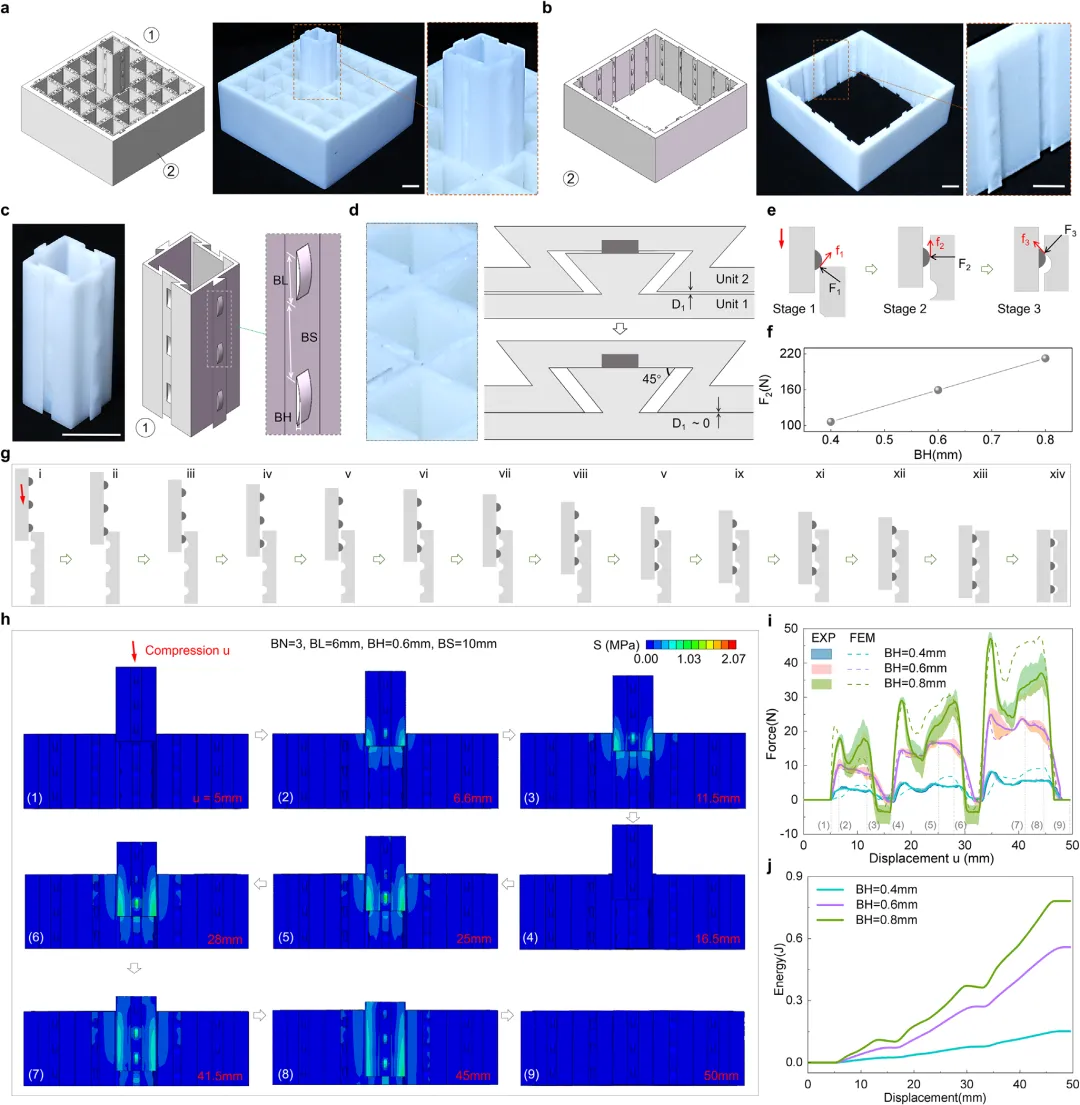
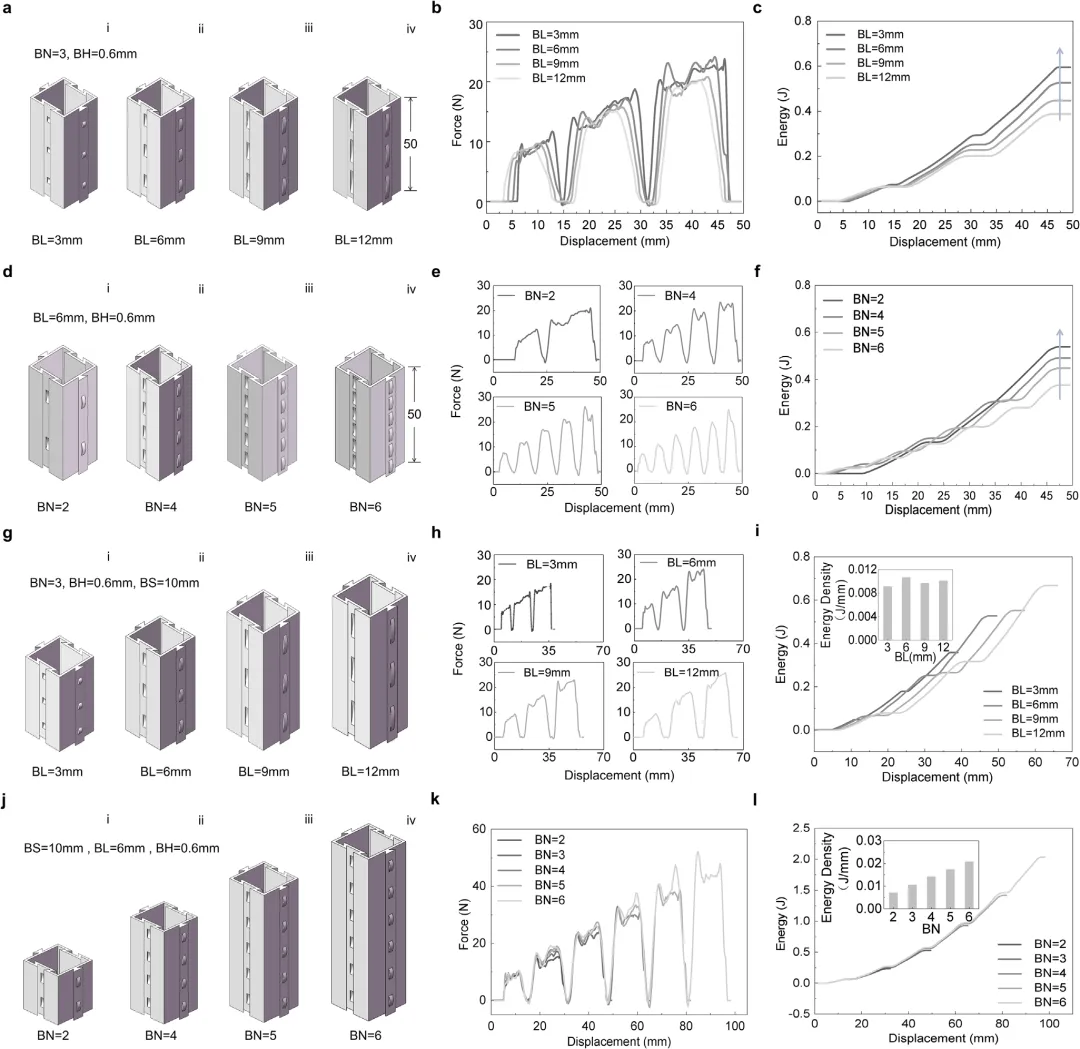
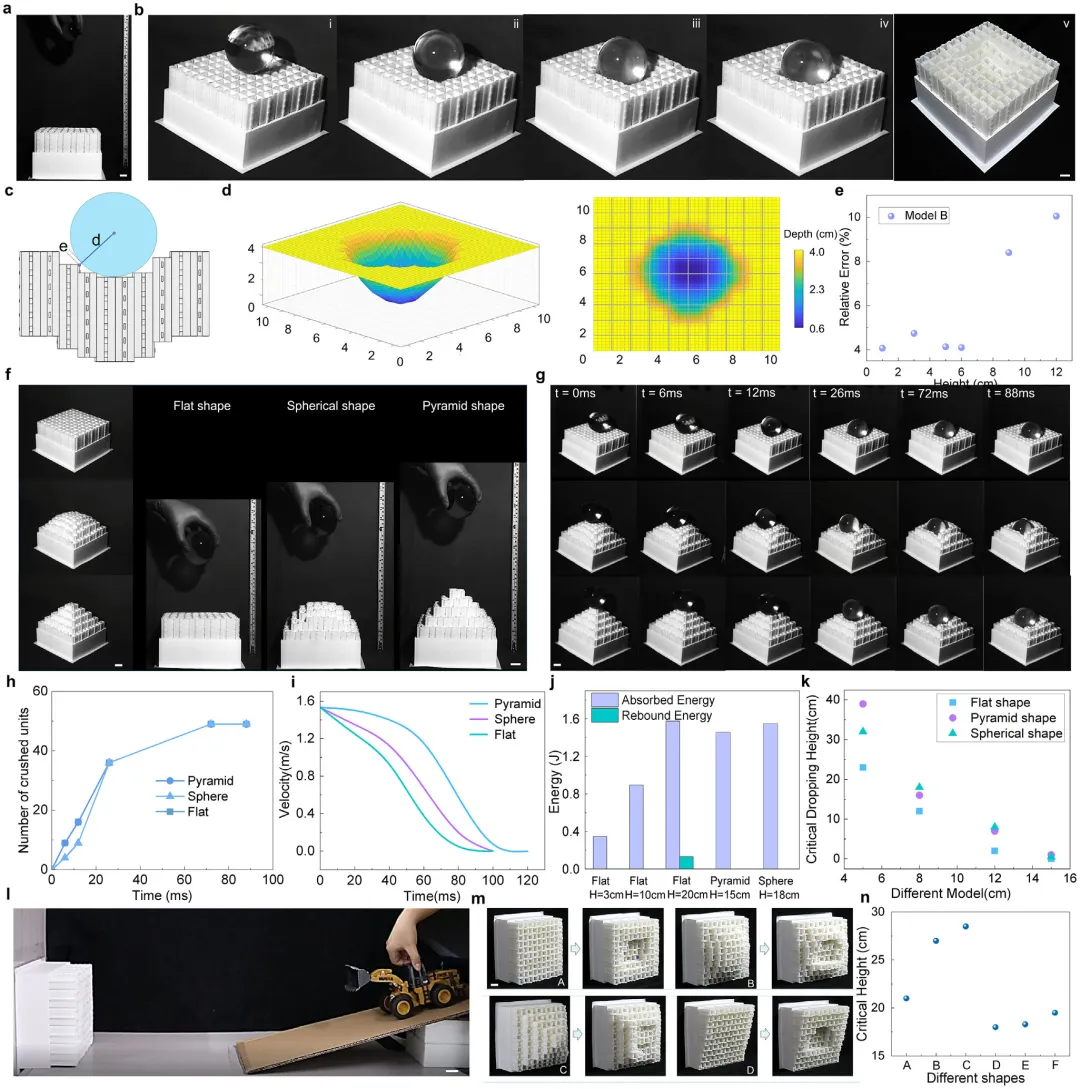
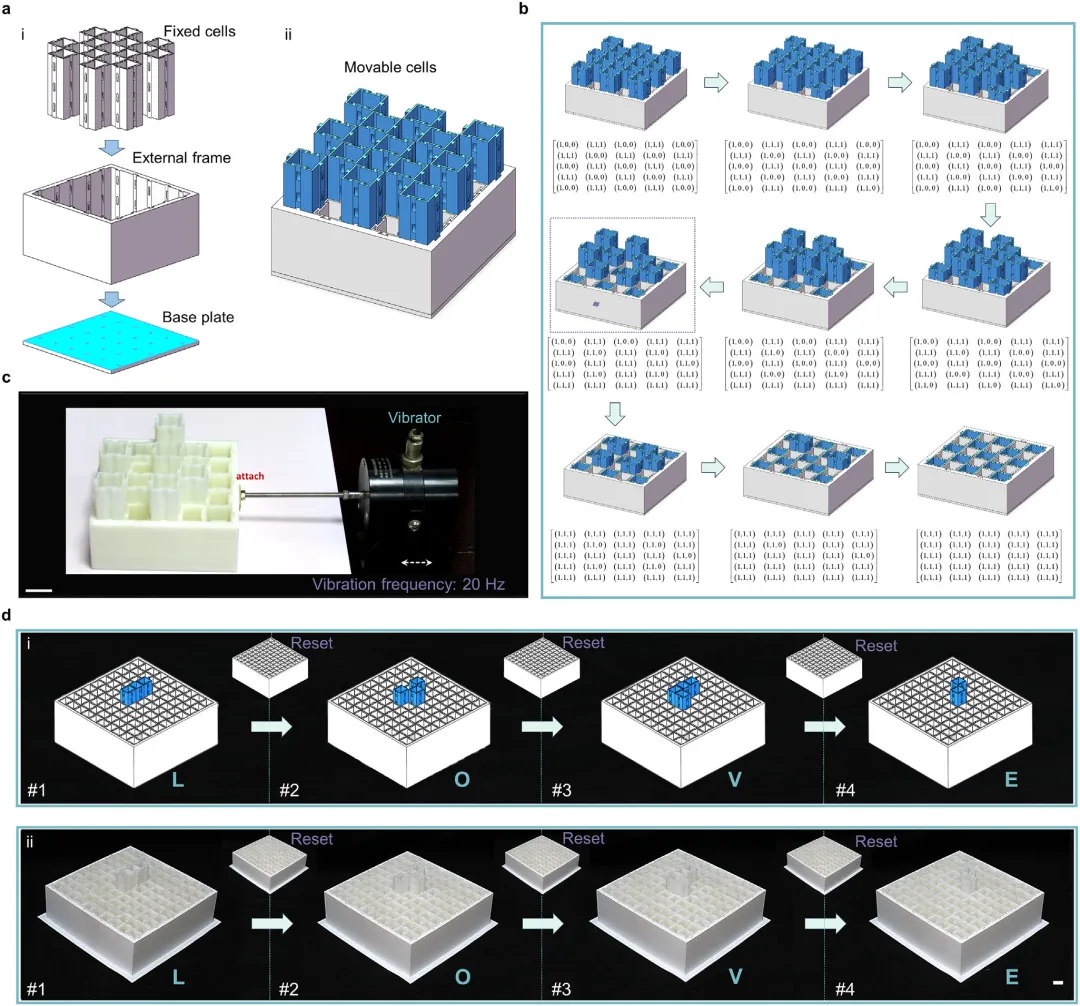
a) 系统可从单一前体结构(S₀)重编程为多种形状(Sₖ)。b) 结构由离散结构单元构成(左图),单元可独立调节高度,实现局部形状控制(左下)。代表性物理原型展示了零、正、负高斯曲率的形状(右图)。c) 提出的形状-性能编码框架,每个形状对应唯一的力学响应,可建立综合数据库。图2:所提出的形状变形机械超材料的构建及其重构机制与力学响应a) 可重编程形状变形结构的构建示意图,由离散结构单元通过摩擦和互锁的机械相互作用连接,并用边界框架约束。b) 基于5×5设计(单元尺寸2 cm × 2 cm)。c) 离散结构单元的结构设计细节,带有凹形凸起和凸形滑道。凸起由三个参数控制:凸起长度(BL)、凸起高度(BH)、凸起数量(BN)和凸起间距(BS)。d) 压缩过程中单元间凹凸结构部分的不相容和相容配合过程示意图。e) 相邻单元相互作用过程中的力学分量分析。f) 理论计算的接触力 F (N) 与 BH (mm) 的关系。g) 多凸起(图示为三个)相邻单元凹凸相互作用过程的示意图。h) BN = 3,BL = 6 mm,BH = 0.6 mm,BS = 10 mm 时相互作用过程的数值模拟细节。i) 通过比较仅改变 BH(BH = 0.4,0.6 和 0.8 mm)的三个不同单元,得到 (h) 中单轴压缩的力-位移曲线实验和数值结果。j) 根据 (i) 中实验计算的研究单元潜在吸收能量比较。比例尺:2 cm。a) 改变 BL(BL = 3,6,9,12 mm,BN = 3,BH = 0.6 mm)时,单轴压缩过程的力-位移曲线数值结果。b) 峰值力与 BL 的关系。c) 不同 BL 对应的吸收能量。d) 改变 BN(BN = 2,4,5,6,BL = 6 mm,BH = 0.6 mm)时,单轴压缩过程的力-位移曲线数值结果。e) 不同 BN 对应的峰值力。f) 不同 BN 对应的吸收能量。g) 改变 BS(BS = 6,10,14 mm,BL = 6 mm,BN = 3,BH = 0.6 mm)时,单轴压缩过程的力-位移曲线数值结果。h) 峰值力与 BS 的关系。i) 不同 BS 对应的吸收能量。j) 改变 BH(BH = 0.4,0.6,0.8 mm,BL = 6 mm,BN = 3,BS = 10 mm)时,单轴压缩过程的力-位移曲线数值结果。k) 峰值力与 BH 的关系。l) 不同 BH 对应的吸收能量。比例尺:2 cm。图4:所提出的形状变形机械超材料形状与性能编码关联的演示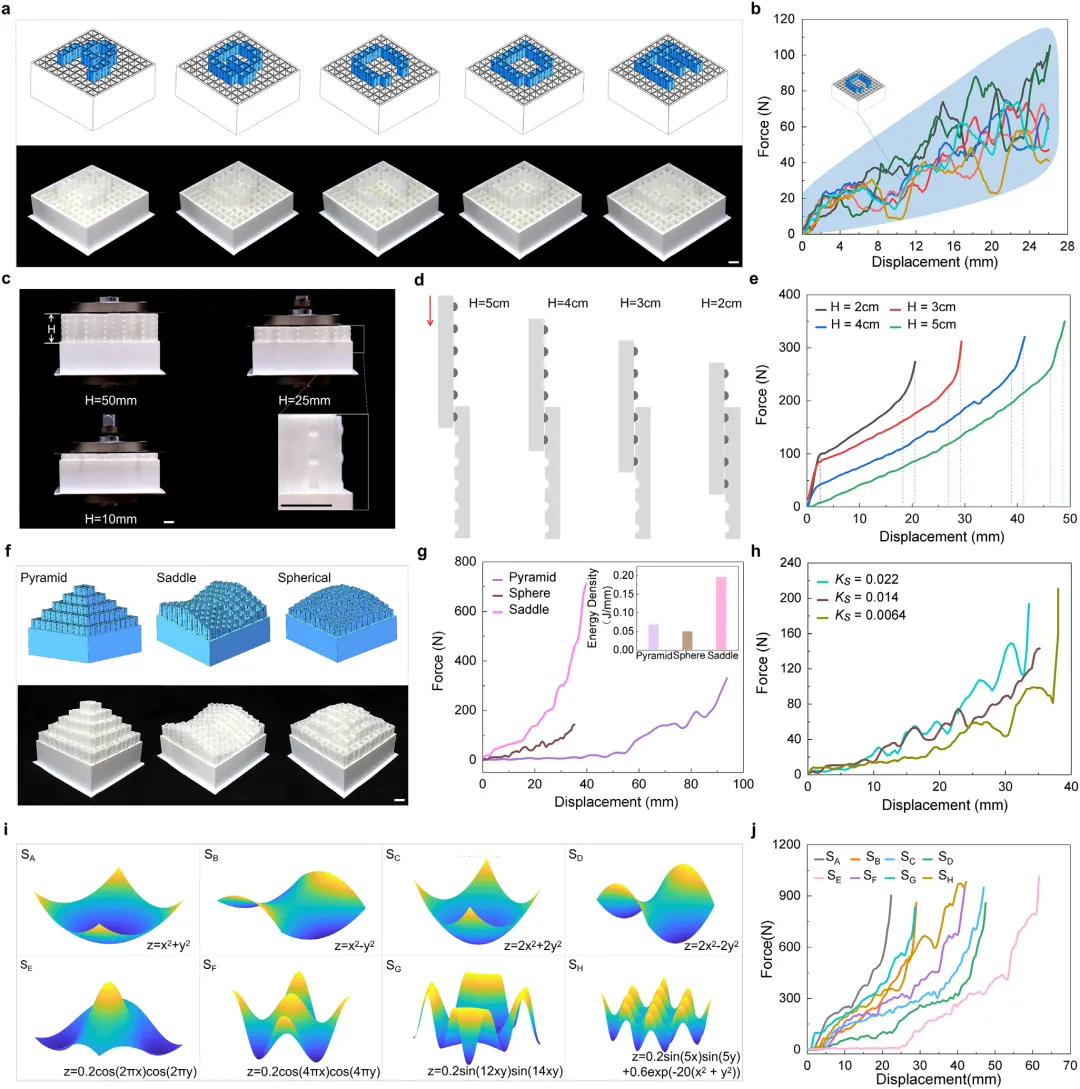 所有演示均基于 10×10 原型。a, b) 结构形状重编程特性(a)及其单轴压缩力-位移曲线结果(b)的示意图和实验演示。c-e) 通过拉伸不同高度 H 的单元形成平面形状,演示形状-性能编码关联(c)。该过程通过同时压缩所有结构单元实现,相互作用主要发生在边界框架及其接触单元之间。研究了四种不同平面形状,H = 2,3 cm,4 和 5 cm(d)。所有形状均呈现多段强化力-位移曲线(e)。f-h) 通过具有零(金字塔)、负(马鞍)和正(球冠)高斯曲率的曲面形状(f)演示形状-性能编码关联,它们均表现出独特的力-位移曲线(g,h)。i, j) 通过数学定义的形状(i)演示形状-性能编码关联,每种形状均表现出独特的力-位移曲线(j)。比例尺:2 cm。所有演示均基于 10×10 原型。a-d) 通过在平面形状上落下玻璃球(直径 = 80 mm)演示自适应能量吸收行为(a)。用高速相机捕捉下落过程,见图 b 中 i-iv(b)。平面形状最终变形并形成近似球形(图 b 中 v),通过实验测量每个重构结构单元的压缩深度进行拟合(c,d)。形成的形状轮廓非常接近冲击球的底部结构包络线,平均误差约为 6%(e)。f) 通过将玻璃球冲击不同的平面、球面和金字塔形状,演示可调能量吸收性能(f)。g) 高速相机捕捉的三种形状冲击过程图像(f)。h) 三种形状在冲击过程中压溃单元数量随时间的变化。i) 冲击三种重构形状顶面后,下落球的速度变化。j) 测试的不同形状的冲击吸收能量。k) 通过监测平面、球面和金字塔形状上玻璃球不反弹的临界下落距离,探索能量吸收能力。测试了不同直径的球(5,8,12,15 cm)。l-n) 通过让挖掘机玩具车撞击结构上(m)一种独特的重构形状,展示其作为碰撞缓冲结构的潜力,该结构具有可调的临界撞击高度(n)。比例尺:2 cm。图6:作为机械存储器和可刷新盲文触觉显示设备的多功能演示所有演示均基于 10×10 原型。a-c) 作为机械存储器设备的应用演示(a),通过使用离散结构单元作为像素,可重编程存储更多信息。由于凸起互锁实现的单元多稳定性(b)以及抵抗外部干扰(如机械振动)的坚固结构稳定性(c),其信息密度高。d) 通过重置和重新配置结构单元在字母 L,O,V,E 之间切换,展示其作为可刷新盲文触觉显示设备的示意图和实验演示。比例尺:2 cm。
所有演示均基于 10×10 原型。a, b) 结构形状重编程特性(a)及其单轴压缩力-位移曲线结果(b)的示意图和实验演示。c-e) 通过拉伸不同高度 H 的单元形成平面形状,演示形状-性能编码关联(c)。该过程通过同时压缩所有结构单元实现,相互作用主要发生在边界框架及其接触单元之间。研究了四种不同平面形状,H = 2,3 cm,4 和 5 cm(d)。所有形状均呈现多段强化力-位移曲线(e)。f-h) 通过具有零(金字塔)、负(马鞍)和正(球冠)高斯曲率的曲面形状(f)演示形状-性能编码关联,它们均表现出独特的力-位移曲线(g,h)。i, j) 通过数学定义的形状(i)演示形状-性能编码关联,每种形状均表现出独特的力-位移曲线(j)。比例尺:2 cm。所有演示均基于 10×10 原型。a-d) 通过在平面形状上落下玻璃球(直径 = 80 mm)演示自适应能量吸收行为(a)。用高速相机捕捉下落过程,见图 b 中 i-iv(b)。平面形状最终变形并形成近似球形(图 b 中 v),通过实验测量每个重构结构单元的压缩深度进行拟合(c,d)。形成的形状轮廓非常接近冲击球的底部结构包络线,平均误差约为 6%(e)。f) 通过将玻璃球冲击不同的平面、球面和金字塔形状,演示可调能量吸收性能(f)。g) 高速相机捕捉的三种形状冲击过程图像(f)。h) 三种形状在冲击过程中压溃单元数量随时间的变化。i) 冲击三种重构形状顶面后,下落球的速度变化。j) 测试的不同形状的冲击吸收能量。k) 通过监测平面、球面和金字塔形状上玻璃球不反弹的临界下落距离,探索能量吸收能力。测试了不同直径的球(5,8,12,15 cm)。l-n) 通过让挖掘机玩具车撞击结构上(m)一种独特的重构形状,展示其作为碰撞缓冲结构的潜力,该结构具有可调的临界撞击高度(n)。比例尺:2 cm。图6:作为机械存储器和可刷新盲文触觉显示设备的多功能演示所有演示均基于 10×10 原型。a-c) 作为机械存储器设备的应用演示(a),通过使用离散结构单元作为像素,可重编程存储更多信息。由于凸起互锁实现的单元多稳定性(b)以及抵抗外部干扰(如机械振动)的坚固结构稳定性(c),其信息密度高。d) 通过重置和重新配置结构单元在字母 L,O,V,E 之间切换,展示其作为可刷新盲文触觉显示设备的示意图和实验演示。比例尺:2 cm。DOI:https://doi.org/10.1002/adfm.75001
—超材料交流群欢迎您的加入—
请扫码添加管理员微信,备注“超材料加群”,管理员会邀请你入群。《超材料世界》致力于打造一个综合、专业、深度的超材料领域信息平台。我们关注力学超材料、光学超材料、人工智能、材料设计等核心方向,追踪超材料与力学、光学、生物医学、航空航天等领域的交叉创新,坚持"严谨、探索、突破、应用"的理念,推动力学学科的高精尖发展。
免责声明:本文旨在传递和分享科研资讯,仅供个人学习、参考和学术交流使用,不作为商业用途,文中所引用文献已指明作者及来源。本文中所出现的所有图片均为转载,由于水平有限可能存在翻译解读不准确等问题,内容速览仅代表作者个人观点 仅供参考,如涉及知识产权保护或其他问题请及时后台私信联系,我们将尽快协调处理。最终解释权归《超材料世界》公众号所有。







 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
