研究背景
随着人工智能与机器人技术的飞速发展,人类与机器之间的界限正变得日益模糊。从智能假肢到沉浸式虚拟现实,下一代交互系统迫切需要能够无缝贴合人体、实时感知生理信号的可穿戴设备。然而,现有技术面临一个根本性瓶颈:传统柔性电子皮肤往往像"拼装电脑"一样,将温度、压力、湿度等不同功能的传感器简单堆叠在一起,这不仅导致设备笨重、佩戴不适,还严重依赖外部电池供电,难以实现真正的"即贴即用"。更棘手的是,当多种刺激同时作用于单一传感器时,信号会像"打结的耳机线"般相互纠缠,让系统无法分辨用户是在发烧出汗,还是单纯心跳加速。因此,如何模仿人体皮肤那样,用单一材料实现多感官融合、自主供能且信号清晰可辨,已成为柔性电子领域亟待攻克的核心挑战。
成果简介
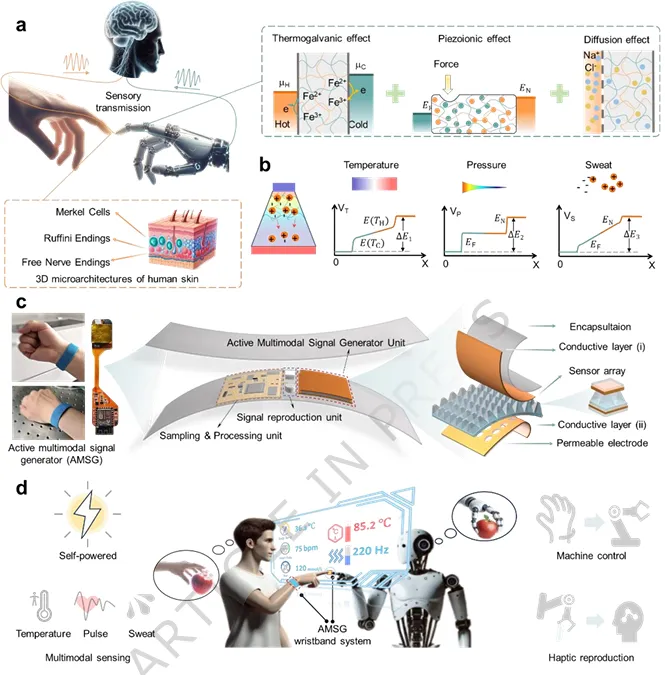
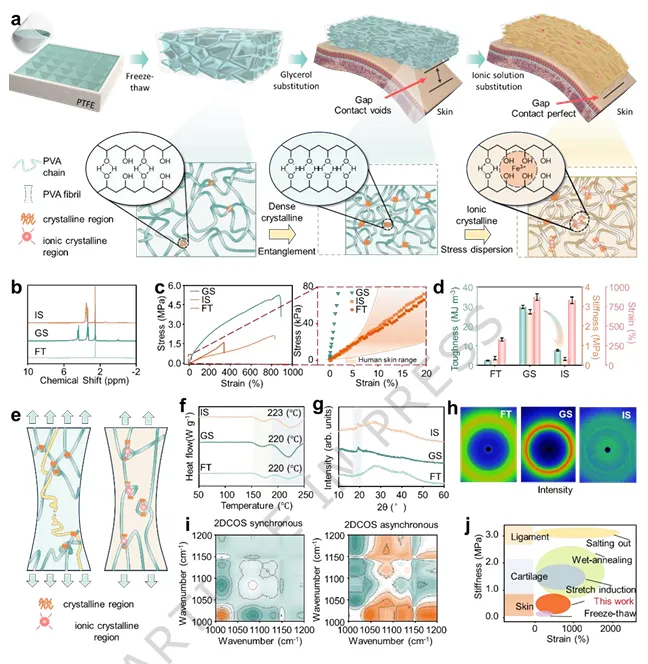
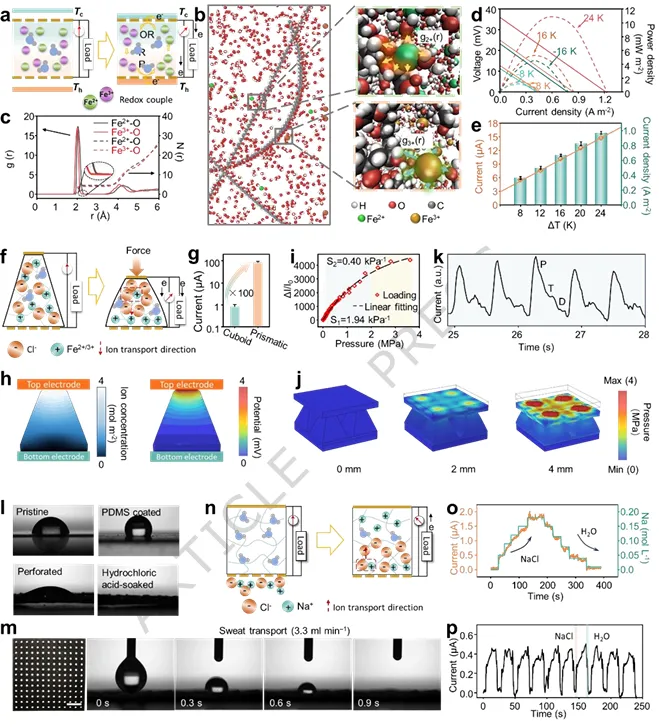
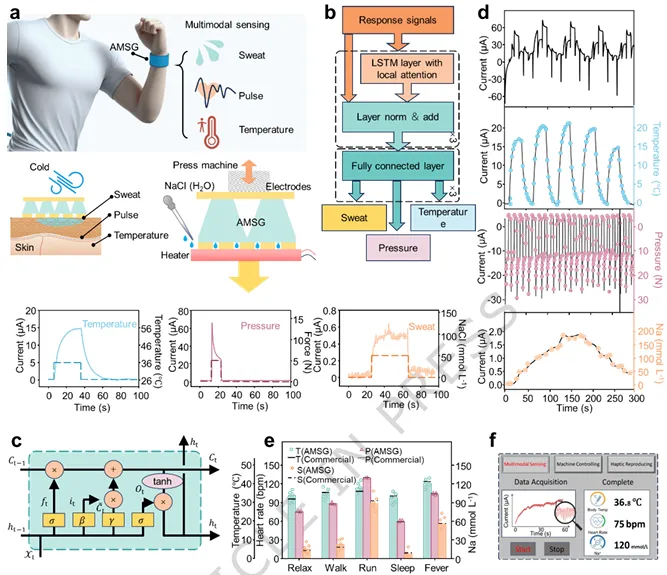
针对上述难题,太原理工大学张虎林教授、新加坡国立大学翟伟博士合作从人体皮肤的微观结构中汲取灵感,开发出一种基于聚乙烯醇(PVA)水凝胶的"电子皮肤"。该材料通过巧妙的"冷冻-置换"工艺,兼具橡皮筋般的延展性(拉伸超800%)和棉花糖般的柔软触感(模量低于300千帕),能完美贴合人体曲面。研究团队创新性地在同一材料中整合了三种自供能机制:利用热电效应感知体温变化,借助压电离子效应捕捉脉搏跳动,通过离子扩散效应监测汗液分泌——这就像在一张"智能薄膜"上同时内置了温度计、血压计和生化检测仪。为解决多信号干扰问题,团队还开发了基于注意力机制的人工智能算法,能够像"信号翻译官"一样实时解耦混合信号。最终,这些技术被集成到一款主动多模态信号发生器(AMSG)腕带中,成功实现了手势控制机械臂、远程触觉反馈等闭环人机交互功能,为智能医疗监测与元宇宙交互开辟了全新可能。
图文导读
图1:PVA水凝胶电子皮肤的合理设计及其在AMSG腕带界面中的集成。
图2 | 通过顺序溶剂置换制备PVA水凝胶及其材料特性。
图3 | 多模态感知能力和机制。
图4 | 通过机器学习模型解耦的多模态生理感知。
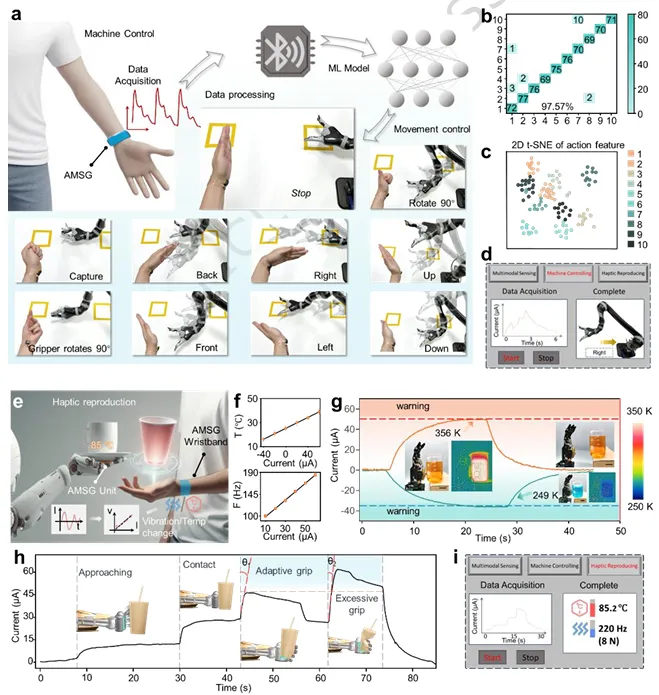
图5 | 通过基于手势的机器人控制和触觉反馈再现演示闭环人机交互。
文献信息
Bai, C., Dong, X., Liu, Q. et al. A self-powered hydrogel electronic skin with decoupled multimodal sensing for closed-loop human-machine interactions. Nat Commun (2026). https://doi.org/10.1038/s41467-026-69450-9
科研云
线上直播/精品课程
资讯追踪/期刊速递/科研工具